
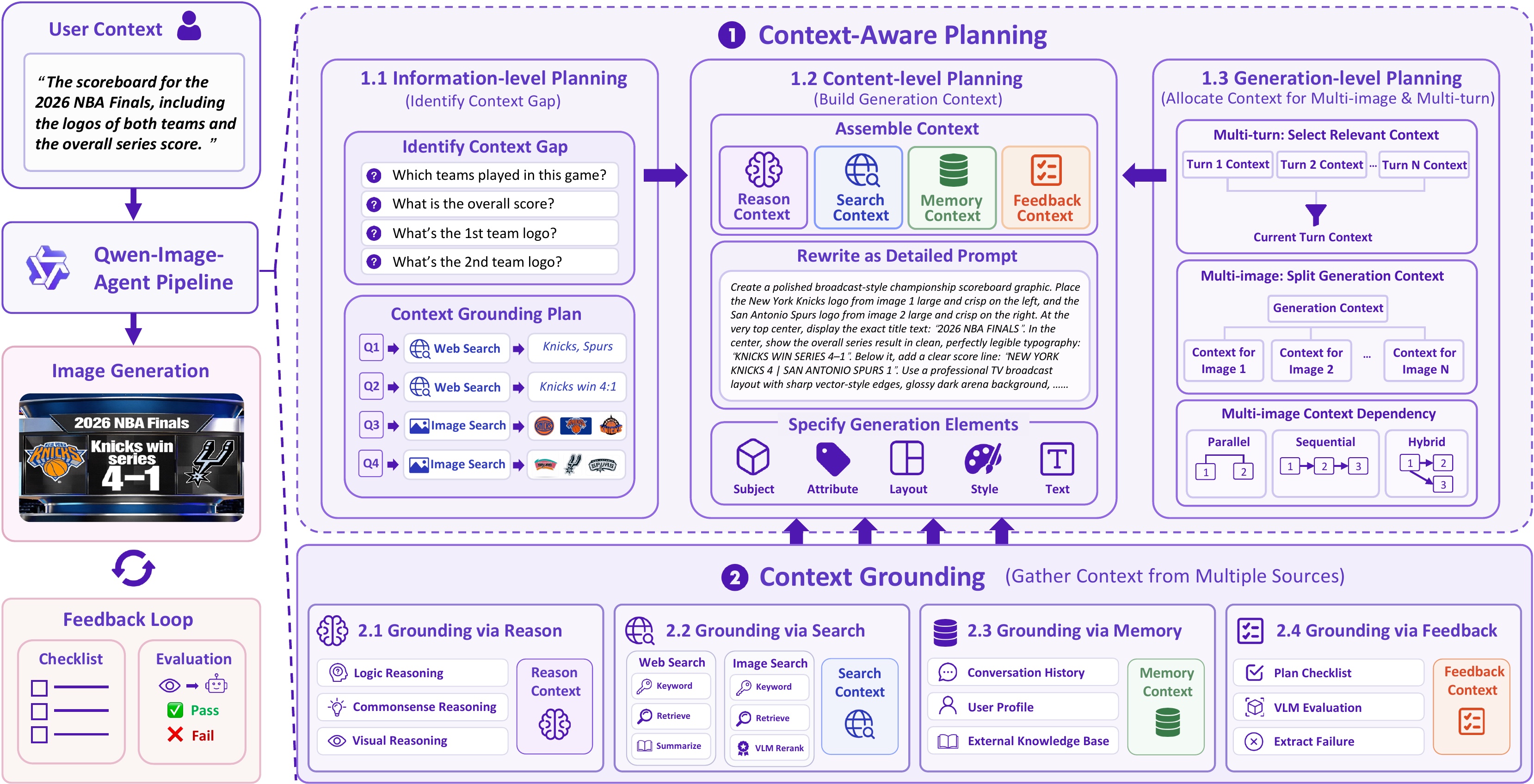
Qwen-Image-Agent — Bridging the Context Gap in Real-World Image Generation
痛点:用户说「做张海报」往往缺细节——隐含意图、实时知识、历史对话。T2I 模型训练时吃「完整 prompt」,部署时吃「残缺 context」→ 作者称 Context Gap(用户 context ≠ 生成所需 context)。
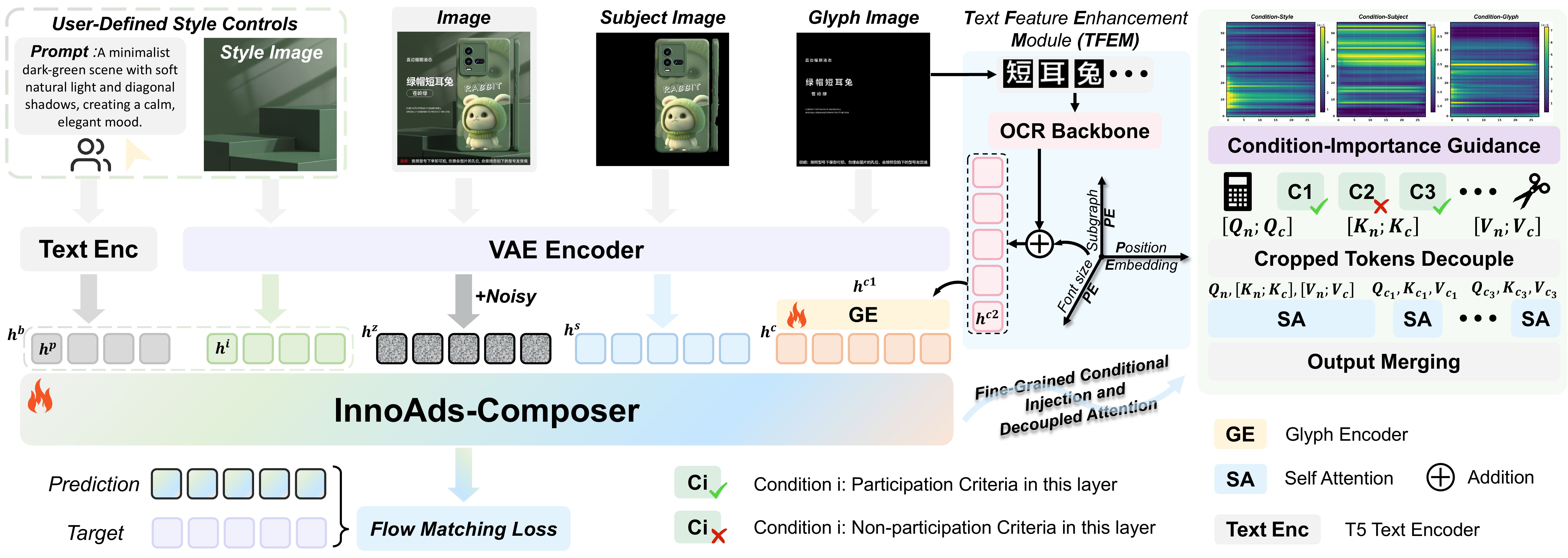
InnoAds-Composer — Efficient Condition Composition for E-Commerce Poster Generation
任务:电商海报 = 一张图里同时摆对商品主体、促销文案、背景风格。多阶段 pipeline(先合成场景再贴字)常出现主体走样、文字错字、风格不统一。
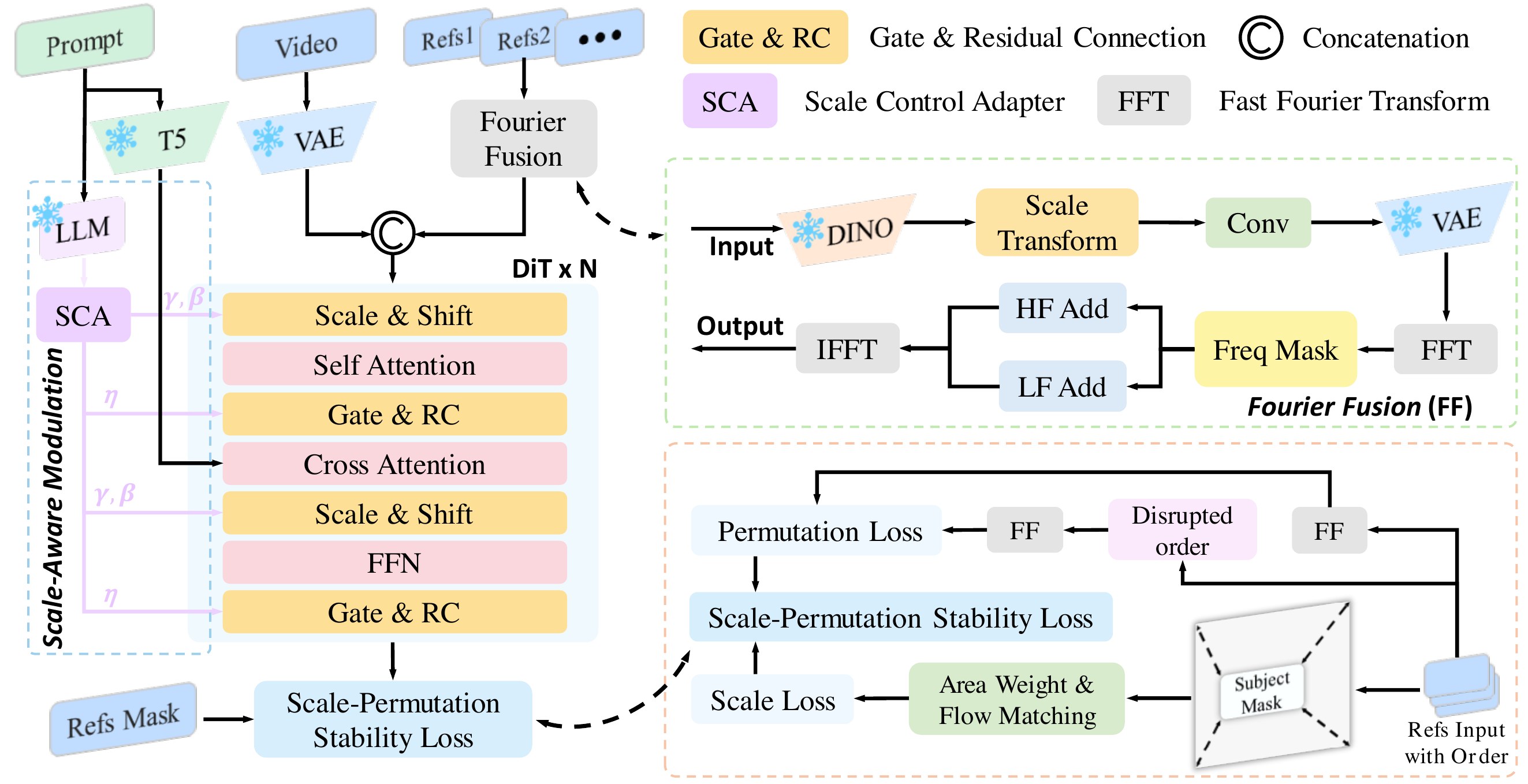
MoFu — Scale-Aware Modulation and Fourier Fusion for Multi-Subject Video Generation
任务:多主体视频生成——给定文本 + 多张参考图,生成多主体一致、尺度自然的视频。
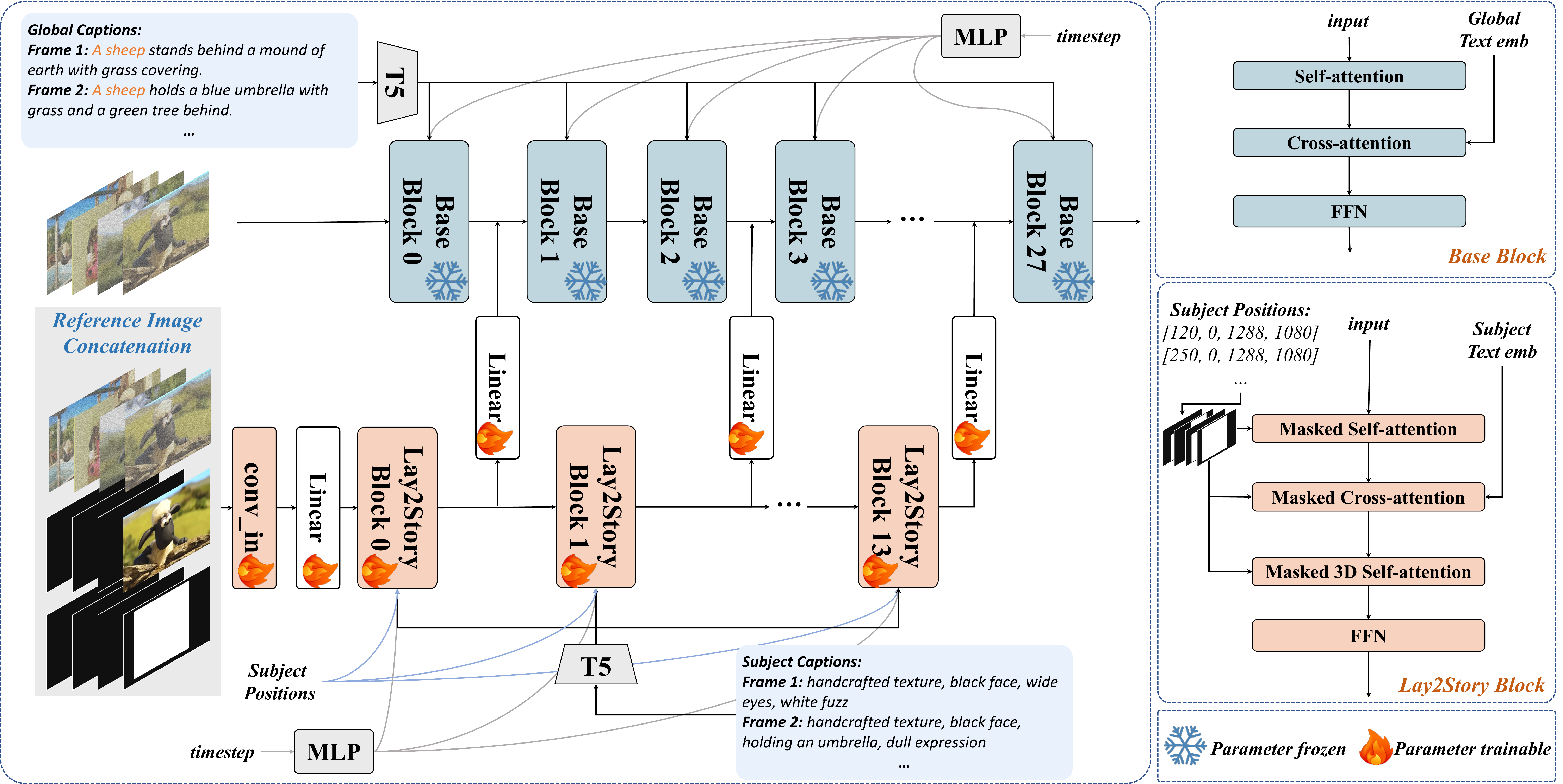
Lay2Story — Extending Diffusion Transformers for Layout-Togglable Story Generation
Storytelling:用一组 prompt 生成多帧图,主角外观要一致。现有 training-free(改 cross-frame attention)和 training-based 都难精细控制位置、衣着、表情、姿势,且缺大规模带 layout 标注的数据。
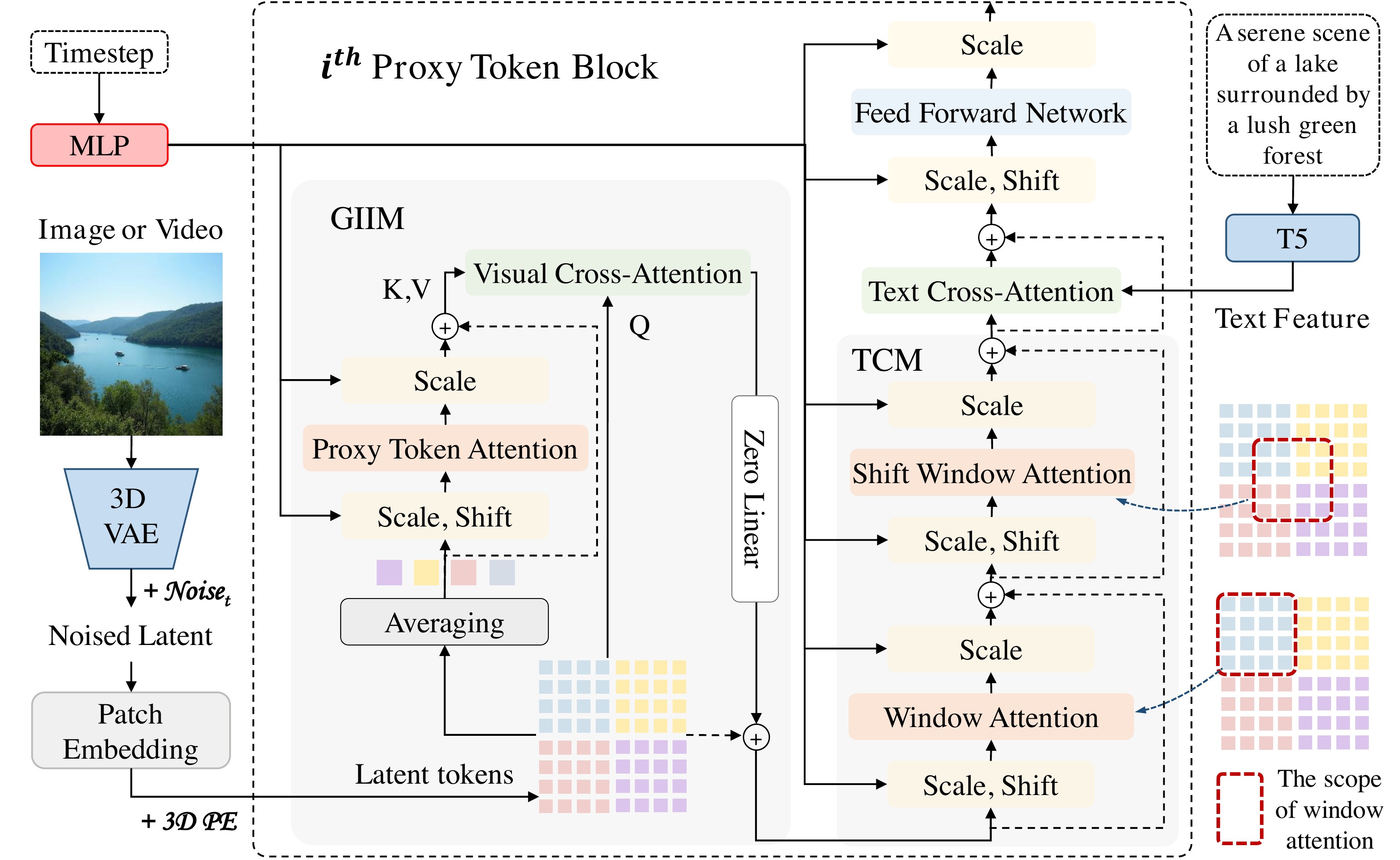
Qihoo-T2X — An Efficient Proxy-Tokenized Diffusion Transformer for Text-to-Any-Task
问题:DiT 全局 self-attention 对视觉 token 是 $O(N^2)$,高分辨率图/长视频算不动;且 PixArt 注意力图显示同窗口内 token 对远处位置注意力几乎一样——大量全局注意力是冗余的。
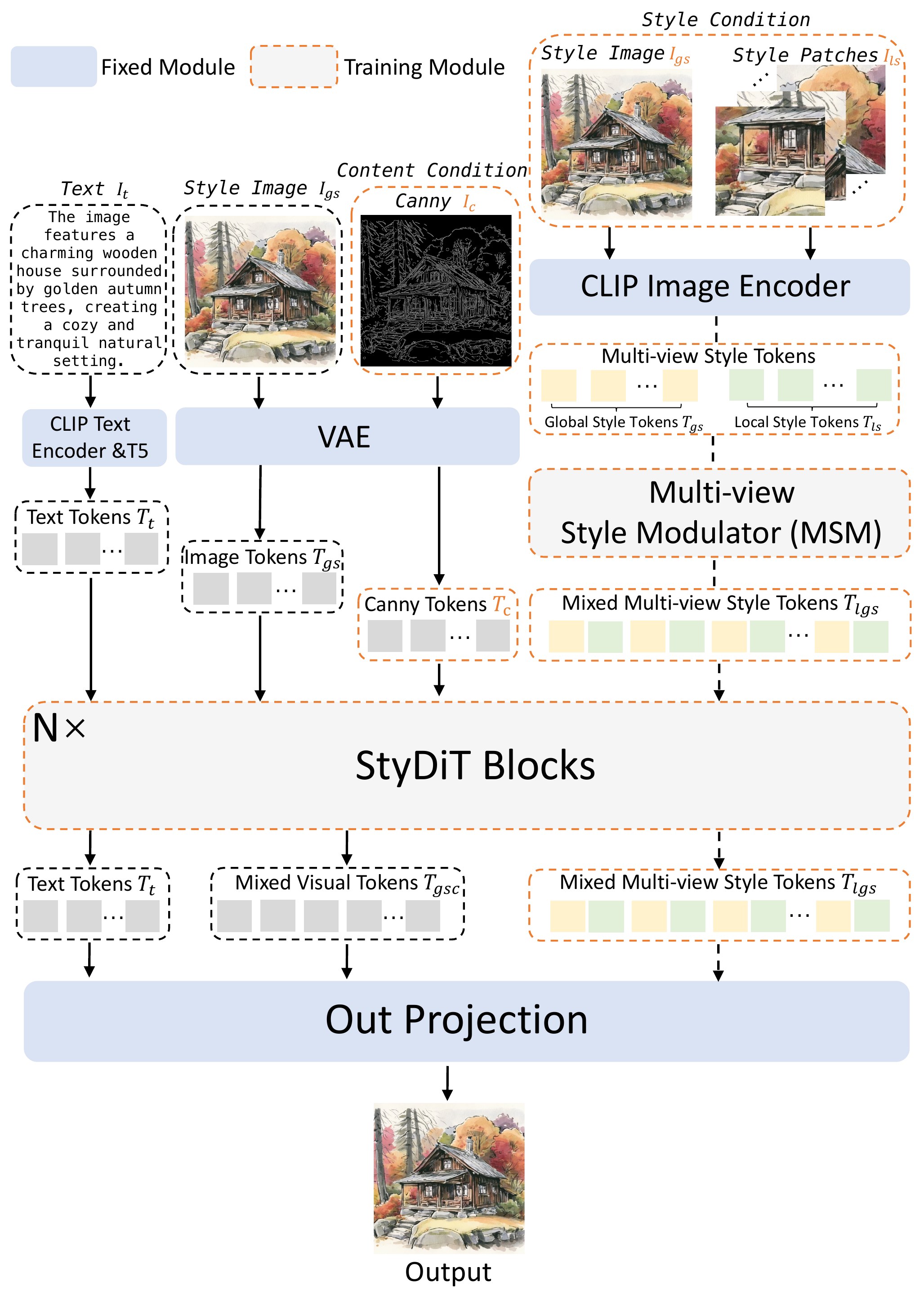
U-StyDiT — Ultra-high Quality Artistic Style Transfer Using Diffusion Transformers
任务:给定内容图 + 风格图,生成超高画质艺术风格化结果——结构跟内容、笔触跟风格,且无伪影/不和谐纹理。
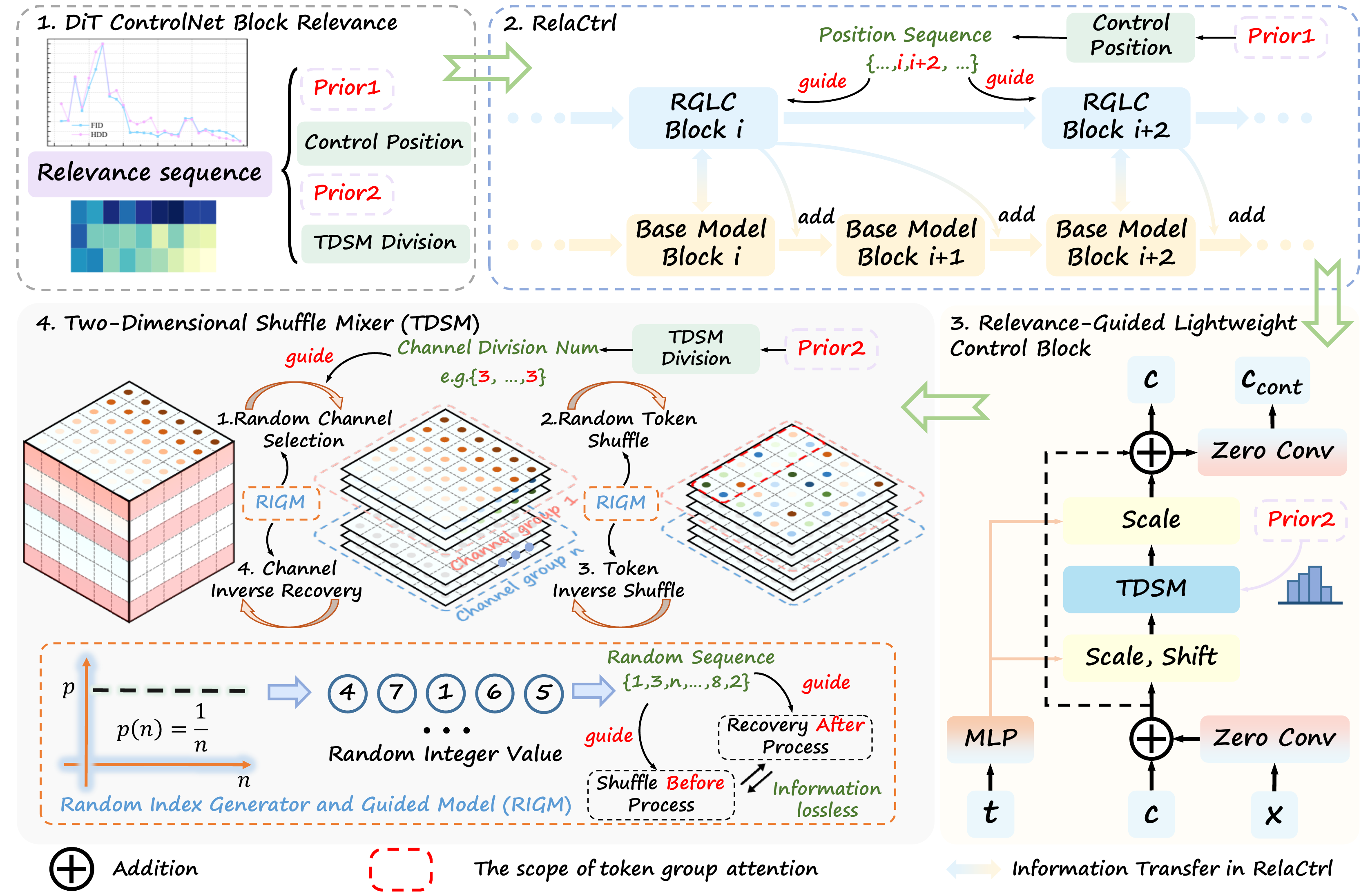
RelaCtrl — Relevance-Guided Efficient Control for Diffusion Transformers
给 DiT 加「可控生成」(Canny、Depth、Seg 等)时,主流做法很「笨重」:PixArt-δ 直接复制前 13 个 DiT block 做 ControlNet,参数和 FLOPs 各涨约 50%;OminiControl 把控制 token 拼进序列,token 数翻倍,FLOPs 涨约 70%。更关键的是——它们假设每一层对控制信号同等重要,均匀堆控制模块,造成大量冗余。
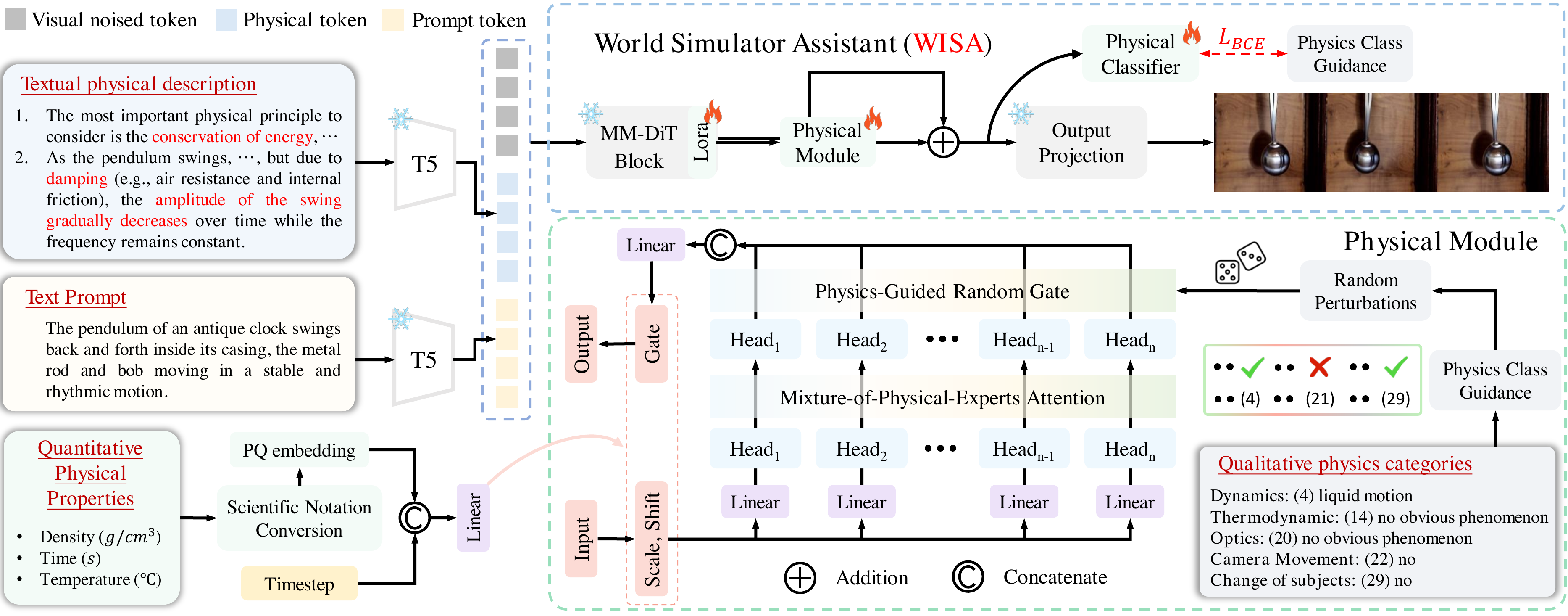
WISA — World Simulator Assistant for Physics-Aware Text-to-Video Generation
Sora、Kling、CogVideoX 能生成逼真视频,但常违反物理:橡皮擦越擦字越黑、苹果落水没有溅起水花、液体运动像随机噪声。根因是抽象物理定律与像素生成之间缺桥梁——模型只学「画面像什么」,没学「过程该怎么演化」。
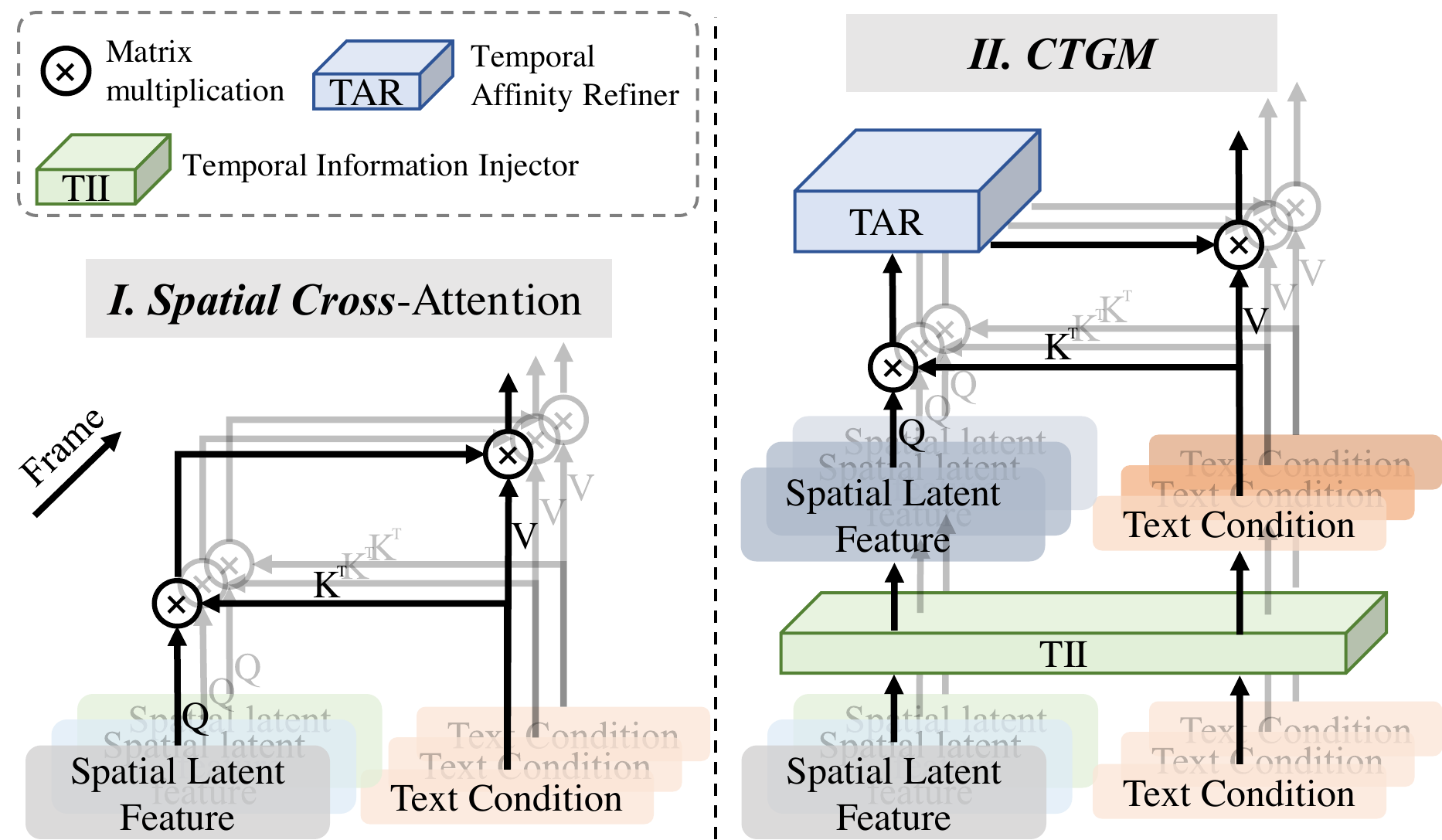
FancyVideo — Towards Dynamic and Consistent Video Generation via Cross-frame Textual Guidance
痛点:AnimateDiff 等 T2V 把同一段 text embedding 复制到每一帧做 spatial cross-attention → [verb] 关注区几乎不变 → 动作弱、长视频更明显。
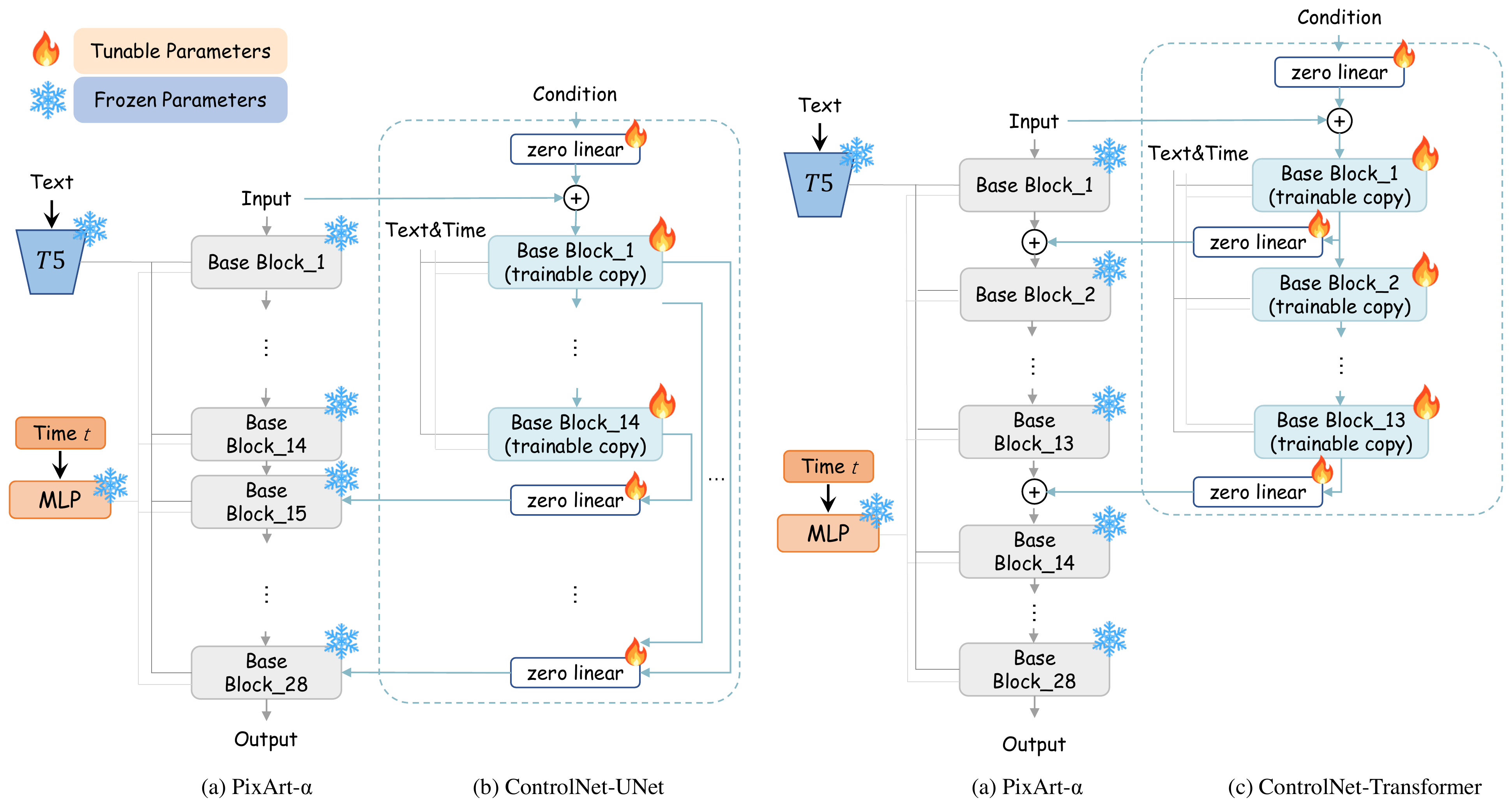
PixArt-δ — Fast and Controllable Image Generation with Latent Consistency Models
PixArt-α 已是高效 DiT 文生图基座;PixArt-δ 在其上叠两层能力:LCM 蒸馏把采样从 14 步压到 2–4 步,A100 上 0.5s/1024px(相对 α 约 7× 加速);ControlNet-Transformer 把边缘/深度等条件注入 DiT,实现细粒度可控生成。
Recent
Recent