

题目
题目描述
输入某二叉树的
前序遍历和中序遍历的结果,请重建该二叉树。假设输入的前序遍历和中序遍历的结果中都不含重复的数字。
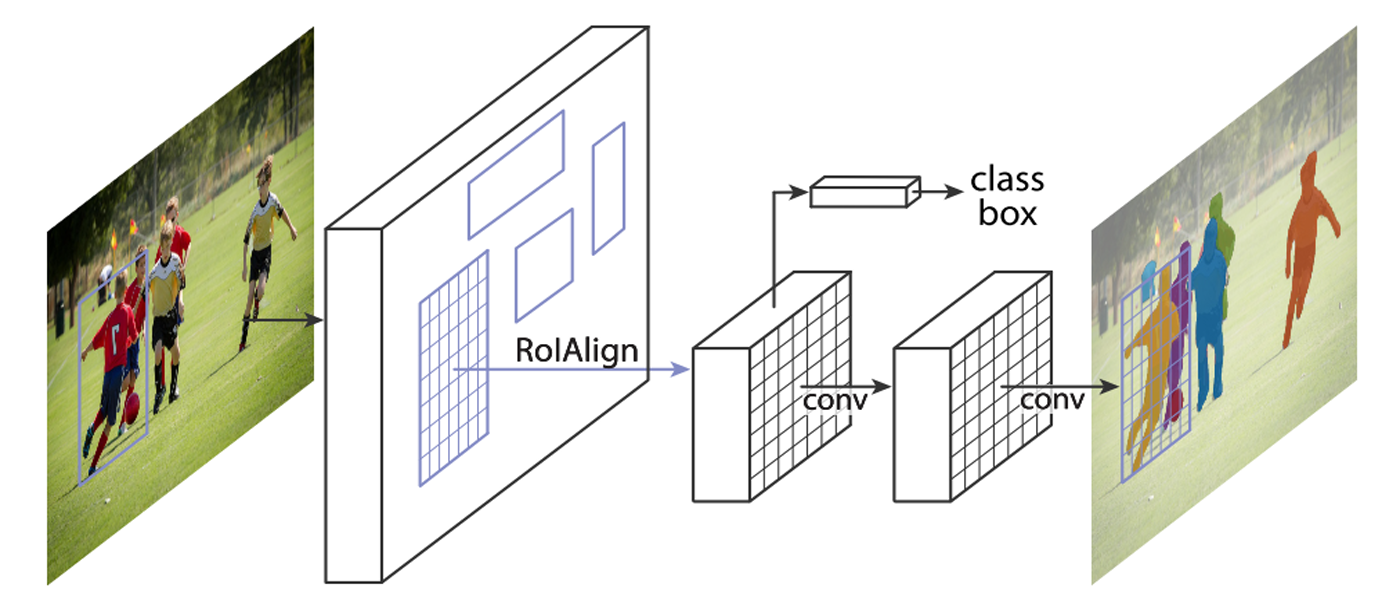
Mask R-CNN[1] is a framework for object instance segmentation, which adds a branch for
predicting an object maskin parallel with the existing branch for bounding box recognition ofFaster R-CNN. There are some details of reading and implementing it.
Update your browser to view this website correctly. Update my browser now