
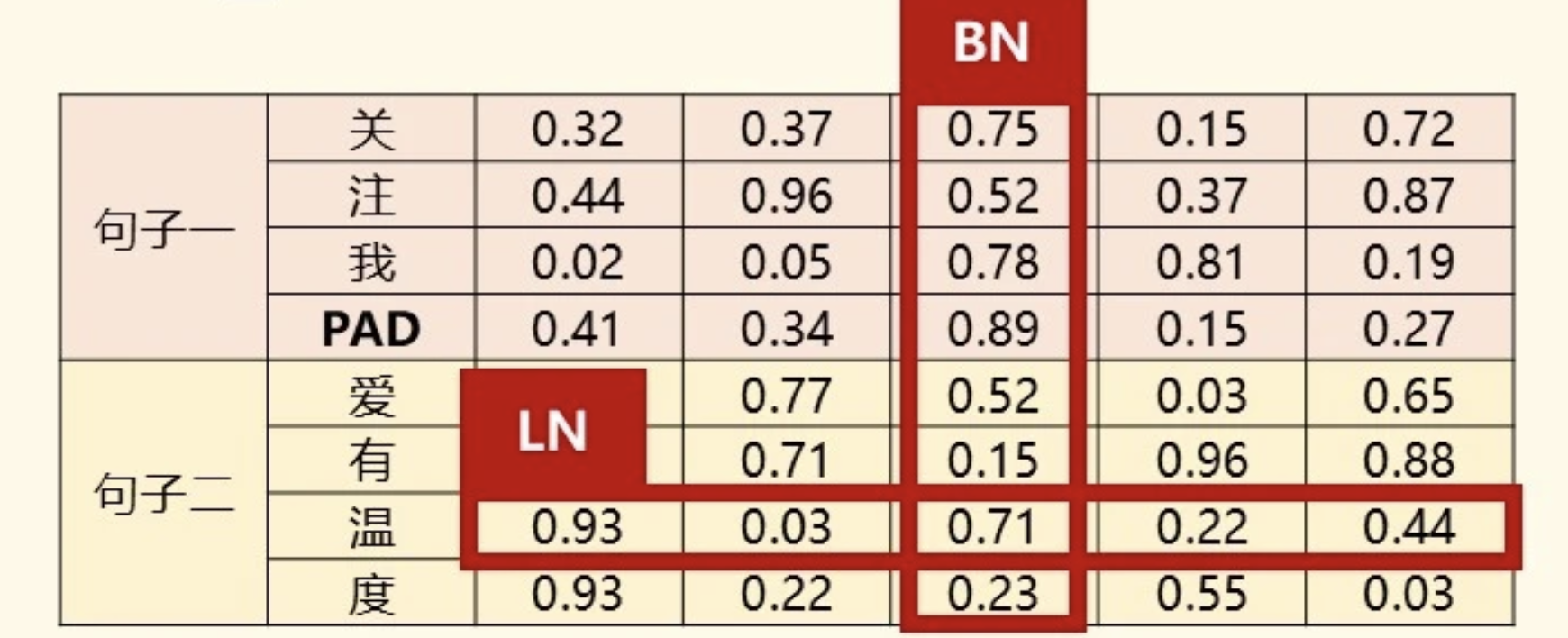
本文整理 BatchNorm / LayerNorm / RMSNorm 的作用与差异,并给出与 PyTorch 思路一致的简化实现(dummy),便于对照官方源码阅读。
本文整理 BatchNorm / LayerNorm / RMSNorm 的作用与差异,并给出与 PyTorch 思路一致的简化实现(dummy),便于对照官方源码阅读。
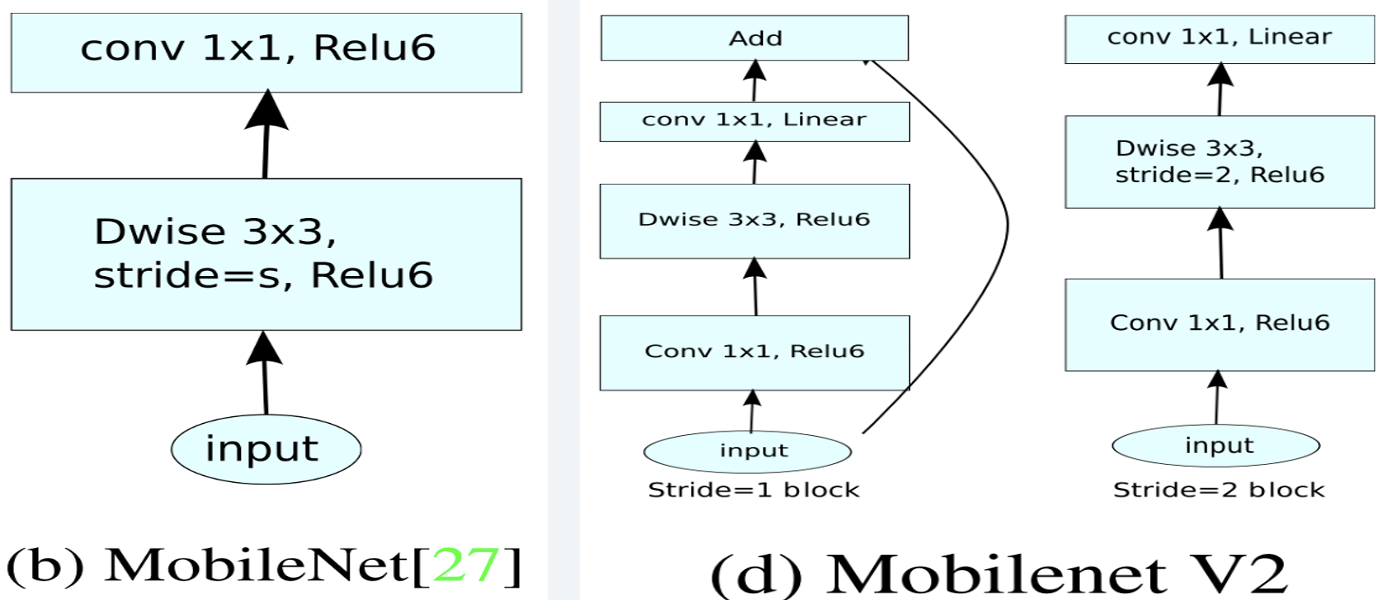
本文整理 MobileNetV1 / V2 (Depthwise Separable、Inverted Residual)中与标准卷积的差异,并给出与常见实现思路一致的 PyTorch 极简模块,便于对照
timm等源码阅读。
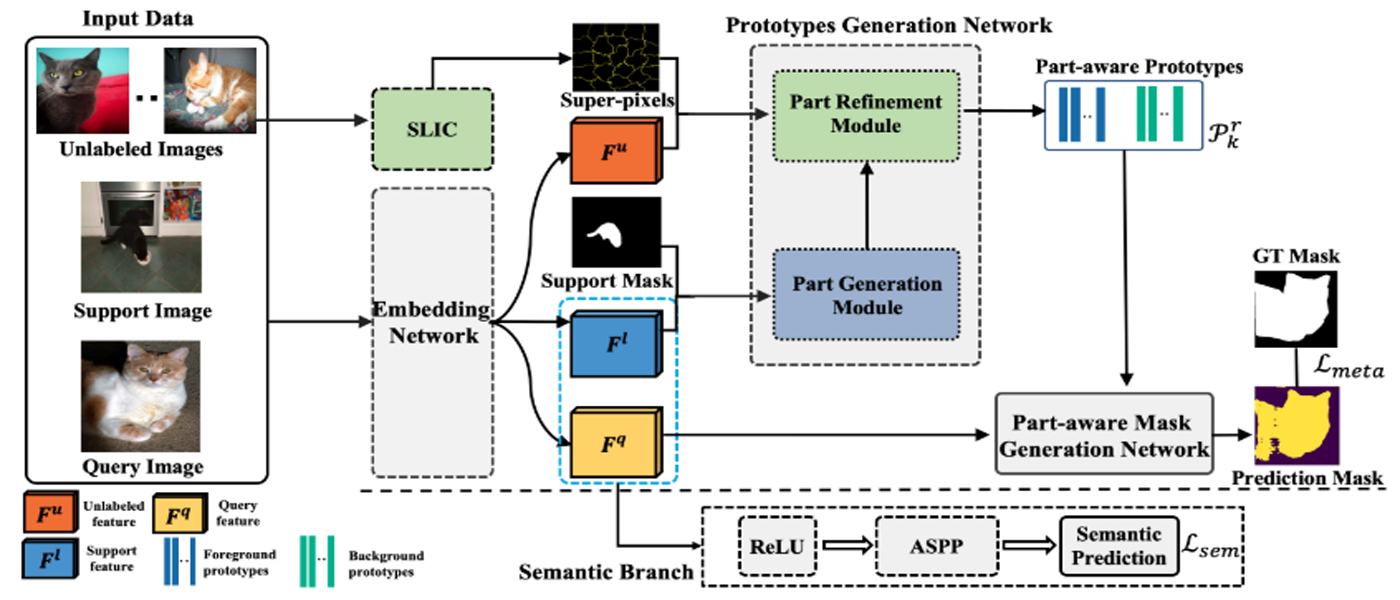
PPNet(Part-aware Prototype Network for Few-shot Semantic Segmentation)[1] decompose the holistic class representation into a set of
part-aware prototypes, and leverageunlabeled datato better modeling of intra-class variations. Besides,graph neural networkmodel is used to generate and enhance the proposed part-aware prototypes. There are some details of reading and implementing it.
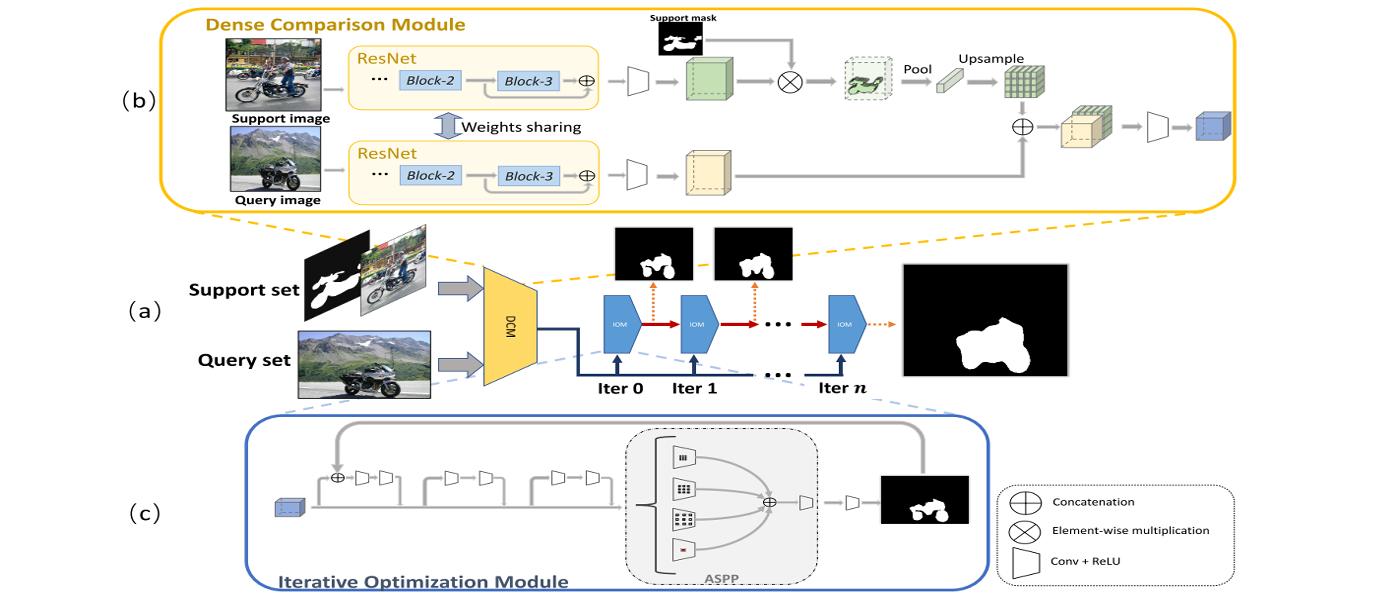
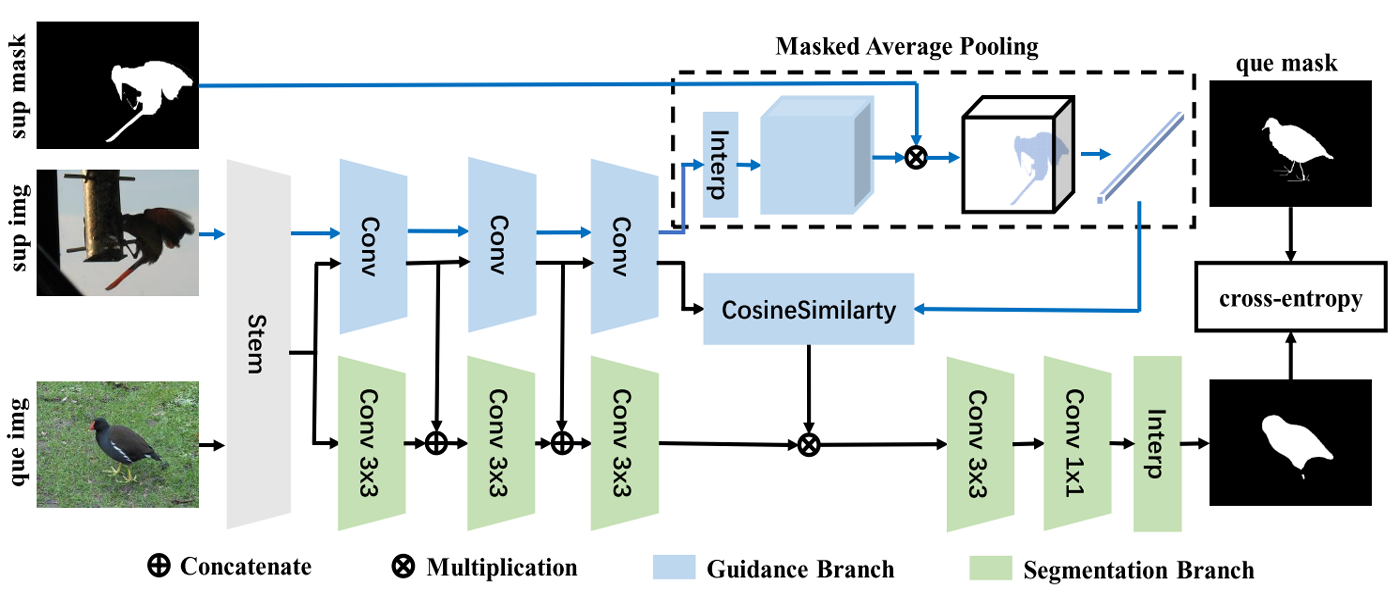
CANet(CANet: Class-Agnostic Segmentation Networks with Iterative Refinement and Attentive Few-Shot Learning)[1] consists of a two-branch dense comparison module which performs
multi-level feature comparison, and an iterative optimization module which iterativelyrefines the predicted results. There are some details of reading and implementing it.
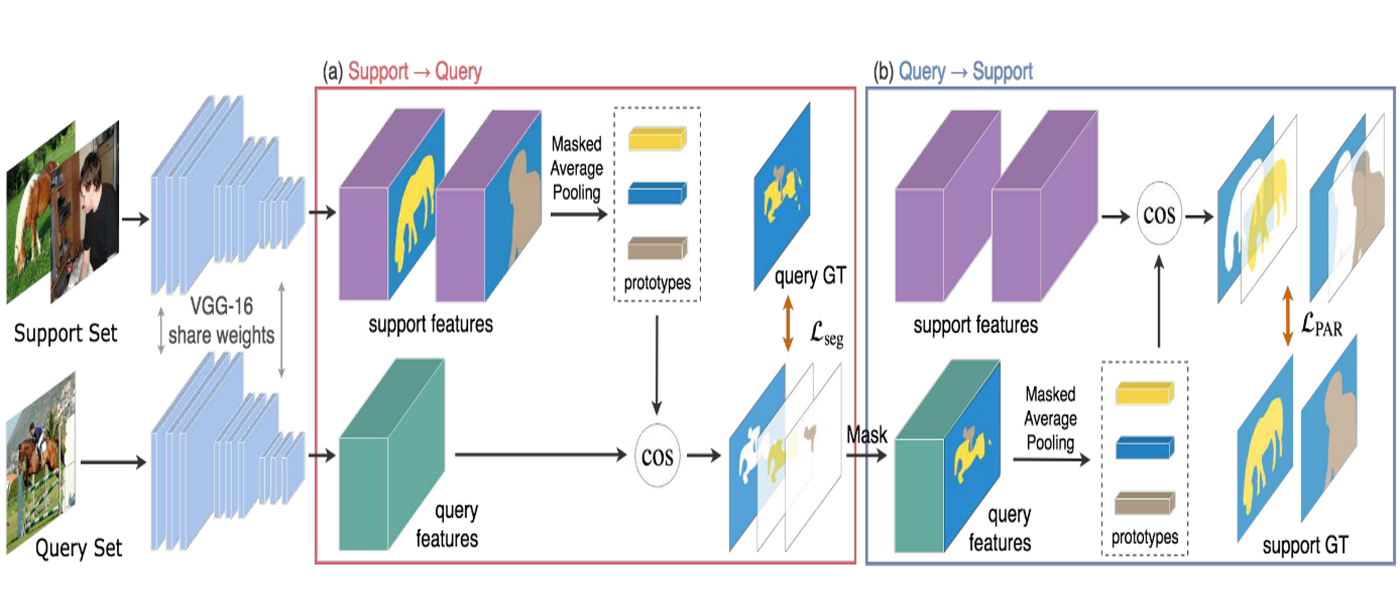
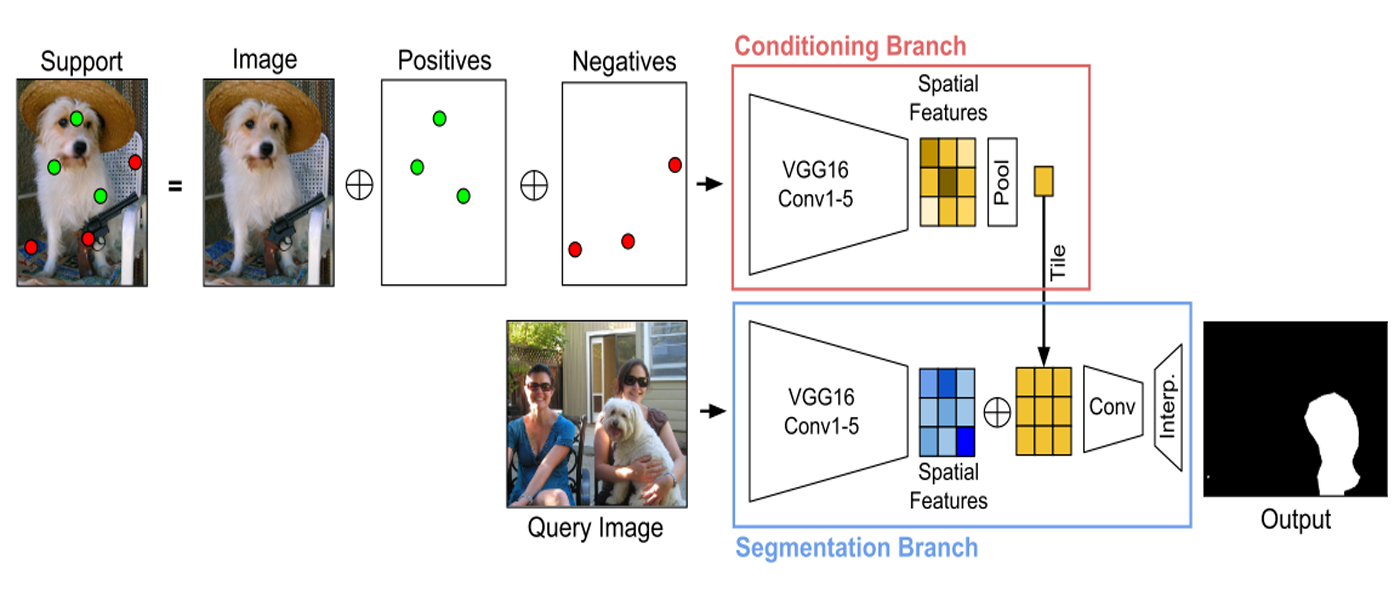
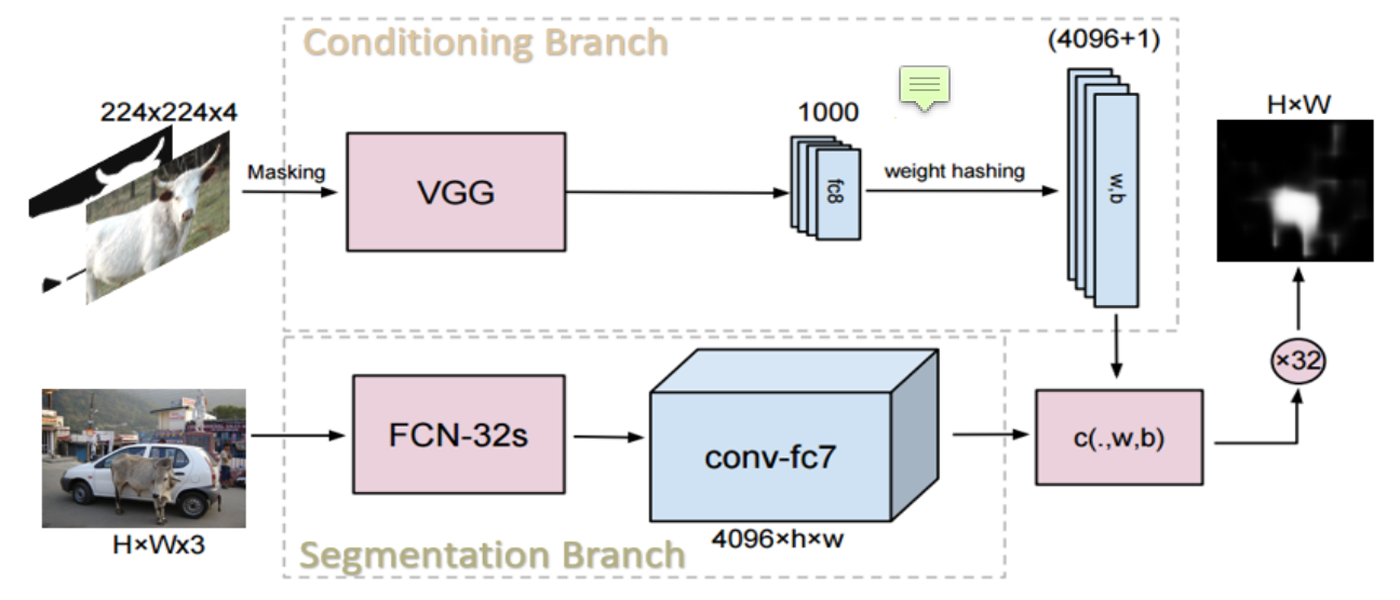
OSLSM(One-Shot Learning for Semantic Segmentation)[1] firstly proposed two-branch approach to one-shot semantic segmentation. Conditioning branch trains a network
to get parameter$\theta$, and Segmentaion branchoutputs the final maskbased on parameter $\theta$. There are some details of reading and implementing it.
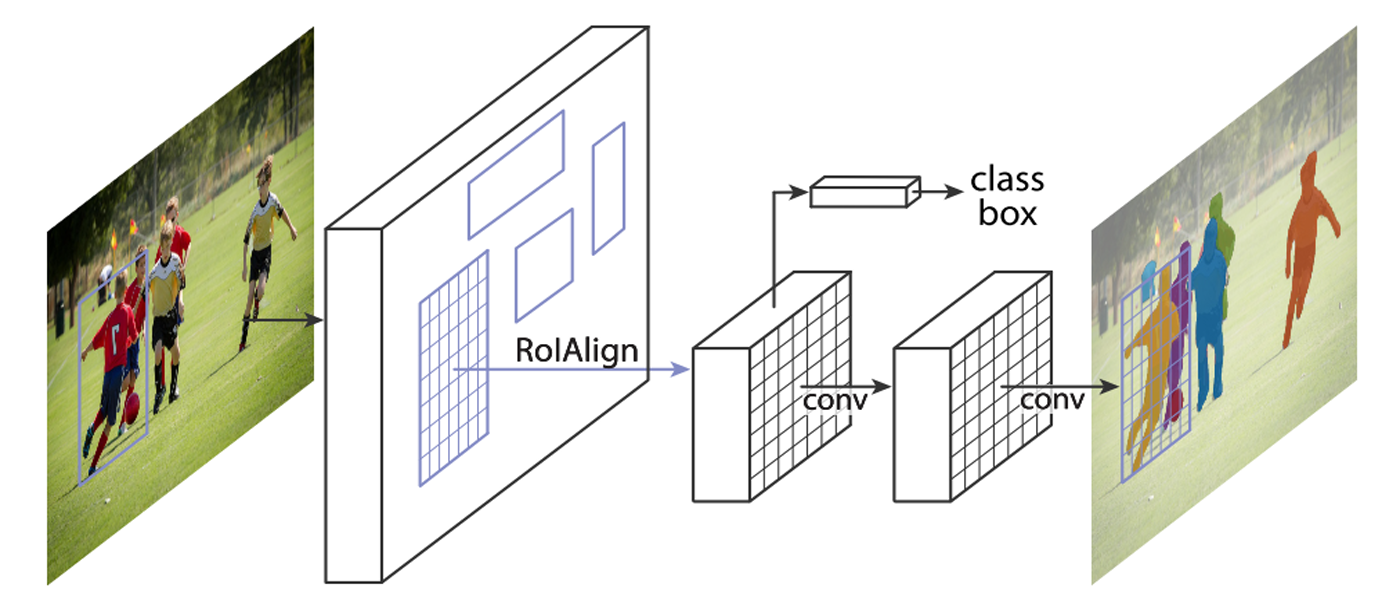
Mask R-CNN[1] is a framework for object instance segmentation, which adds a branch for
predicting an object maskin parallel with the existing branch for bounding box recognition ofFaster R-CNN. There are some details of reading and implementing it.
Update your browser to view this website correctly. Update my browser now


