本文整理 MobileNetV1 / V2 (Depthwise Separable、Inverted Residual)中与标准卷积的差异,并给出与常见实现思路一致的 PyTorch 极简模块,便于对照
timm等源码阅读。
Contents
概述与传统卷积
传统卷积块常用组合:Conv + BN + ReLU(或同类激活)。
MobileNet 系列面向移动端与嵌入式场景,通过结构拆分显著降低计算量与参数量:
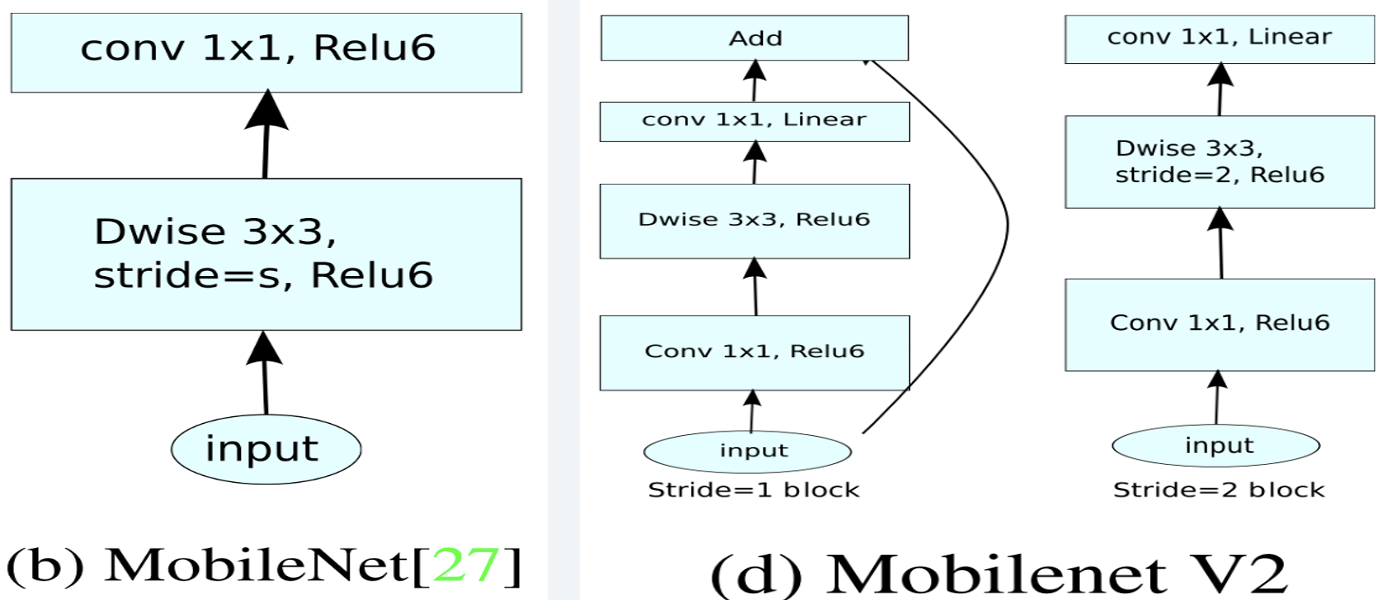
- MobileNetV1:引入 Depthwise Separable Convolution,把标准卷积拆成 Depthwise(逐通道空间卷积) + Pointwise(1×1 通道混合),中间配合 BN 与 ReLU6;
- MobileNetV2:在 V1 基础上使用 Inverted Residual(瓶颈倒置):先 扩张(expansion) → Depthwise → 投影(projection),并在步幅为 1 且输入输出通道一致时使用 残差相加;最后一个 pointwise 后通常 不再接 ReLU(线性瓶颈),以避免破坏低维表征。
MobileNetV1
对每个输入通道独立做空间卷积(groups = in_channels),再用 1×1 卷积做通道线性组合:
- depthwise:
Conv3×3,groups=in_channels; - pointwise:
Conv1×1,输出期望通道数。
典型激活使用 ReLU6:min(max(x, 0), 6),便于在低精度场景压缩动态范围。
MobileNetV2
与「先压缩再卷积」的残差瓶颈相反,Inverted Residual 在低维输入上先用 1×1 升高通道(expand),在高维空间做 depthwise,再用 1×1 压回低维(project):
- pointwise:
1×1+ BN + ReLU6(扩张到mid_channels,常为in_channels × expansion); - depthwise:
k×k+ BN + ReLU6,groups=mid_channels; - pointwise:
1×1+ BN(一般 无 ReLU,线性瓶颈); - 若
stride == 1且in_channels == out_channels,则out += x。
当 stride≠1 或通道变化时,不进行残差相加。
PyTorch 极简实现
下面是与上文结构对应的教学用模块名:DepthwiseSeparableConv(V1)、ConvDepthwiseConv(V2 倒置残差块)。对照可读性实现,forward 逻辑与常见开源代码一致。
import torch |
工业实现里还会处理膨胀深度卷积、SE、分割头等细节;阅读 **timm** 中命名一致的模块更易对照论文与表格宽度倍数配置。
reference
- Howard et al., MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications(MobileNetV1)
- Sandler et al., MobileNetV2: Inverted Residuals and Linear Bottlenecks
- timm 中与 EfficientNet/MobileNet 系列共享的倒置残差参考实现:timm — InvertedResidual(
_efficientnet_blocks.py)