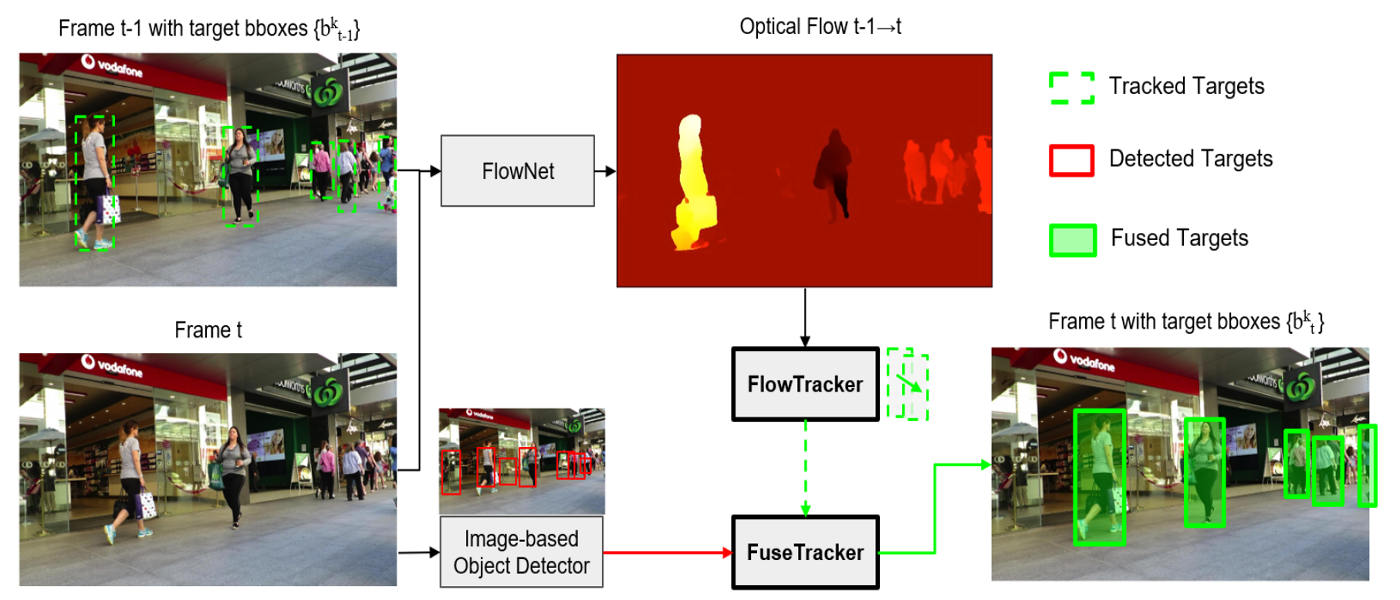
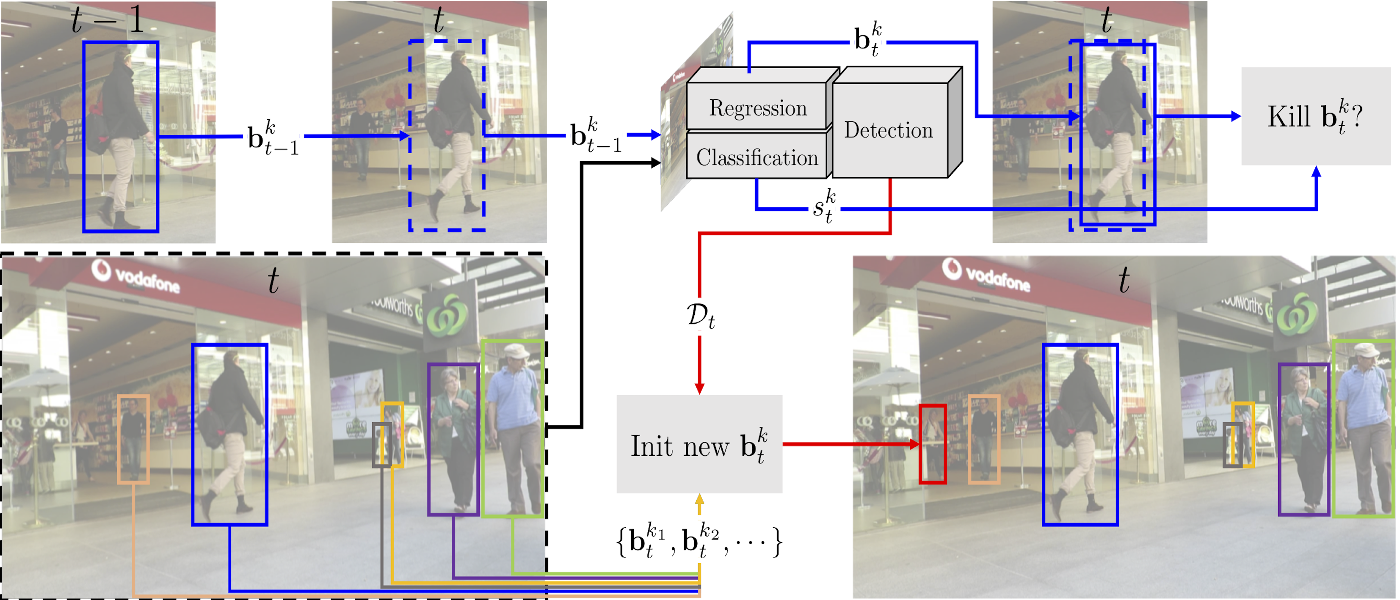

FFT(Flow-Fuse Tracker)[1] is an end-to-end DNN tracking approach, that jointly learns both target
motionsandassociationsfor MOT(multiple object tracking). There are some details of reading and implementing it.
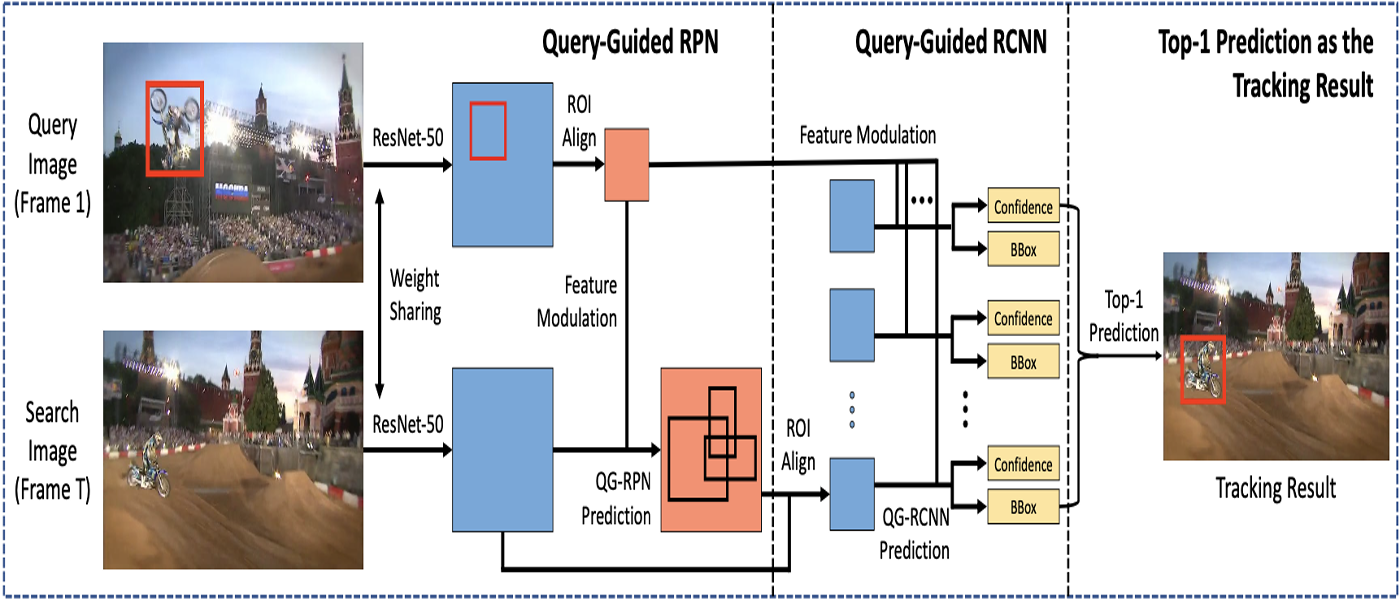
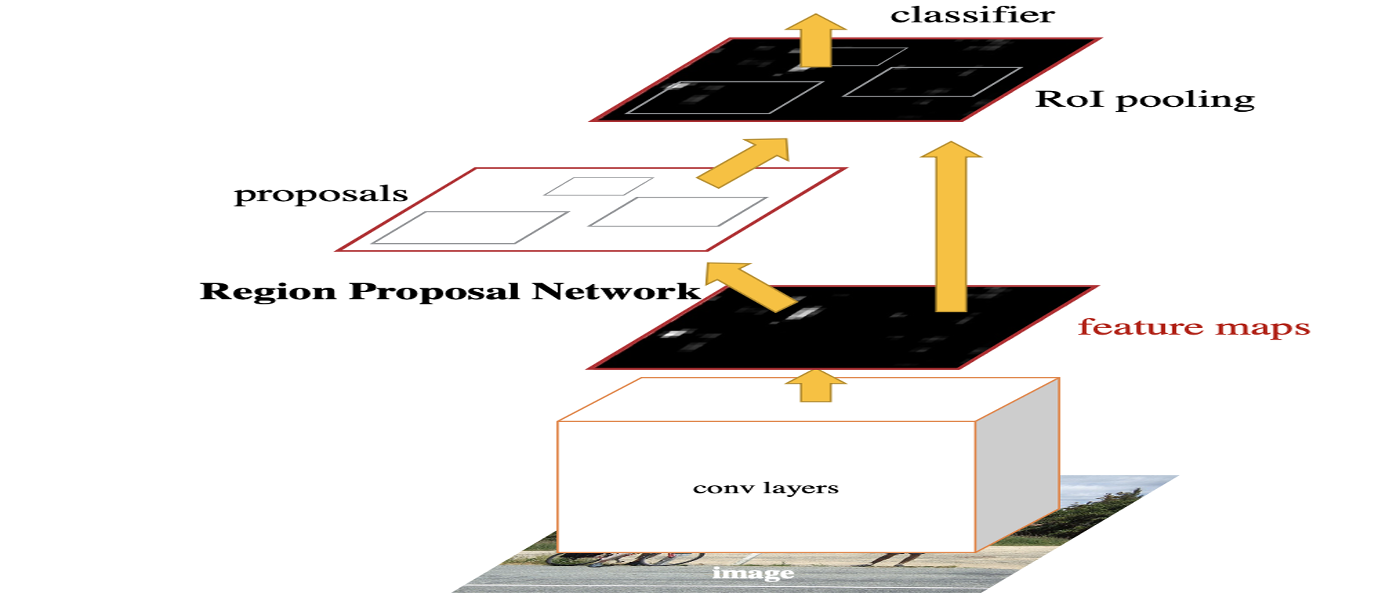
Faster R-CNN[1] is used to detect objects in images, with outputing bounding box and class scores. There are some details of reading and implementing it.
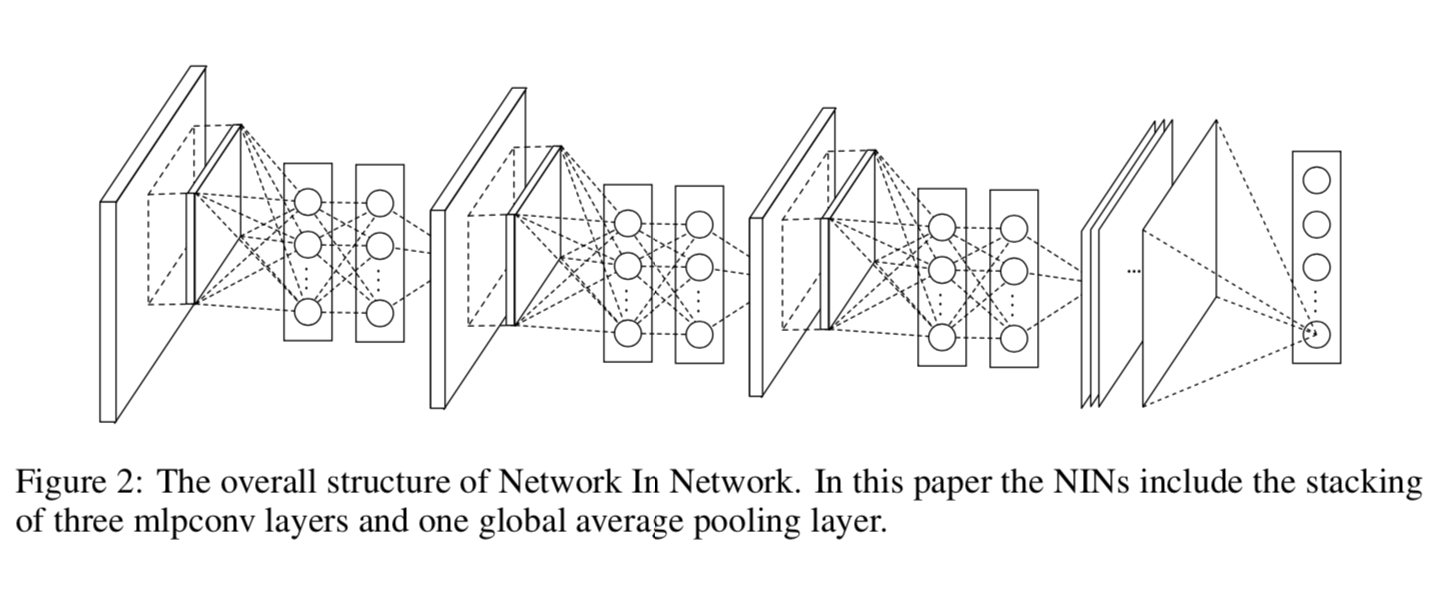
There are some details of reading and implementing the Network In Network for image classification.
Update your browser to view this website correctly. Update my browser now

