SORT[1] is pragmatic approach for online and realtime applications. It achieves SOTA with using
Kalman filterandHungarian algorithm. There are some details of reading and implementing it.
Contents
Paper & Code & note
Paper: Simple Online and Realtime Tracking(ICIP 2016 paper)
Code: PyTorch
Note: Mendeley
Paper
Abstract
- THis paper explores a pragmatic approach to multiple object tracking where the main focus is to
associate objects.- To this end,
detection qualityis identified as a key factor influencing tracking performance.- It only use the
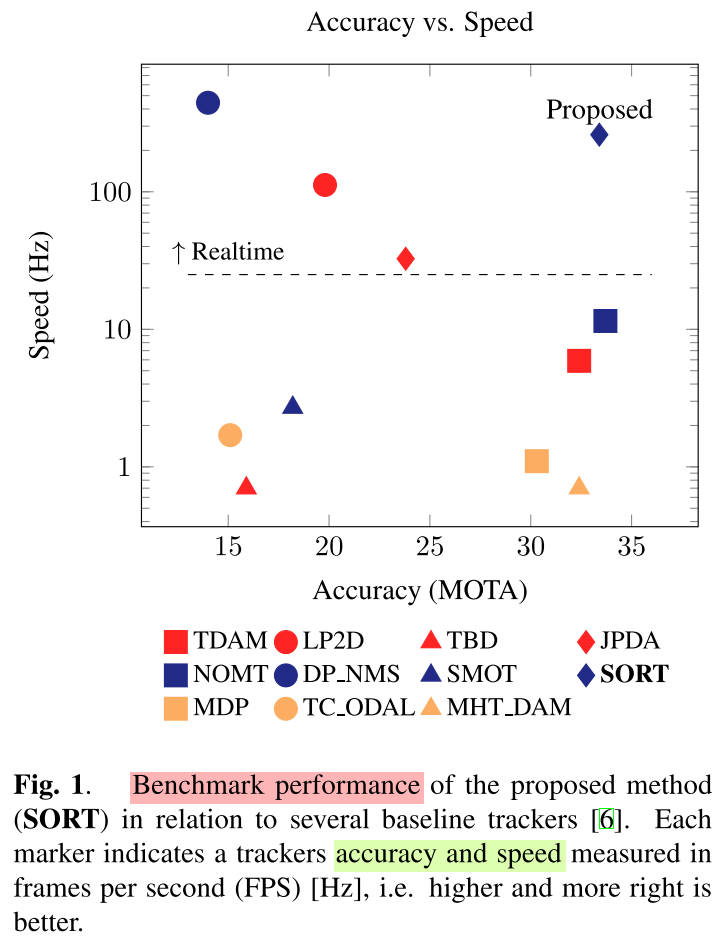
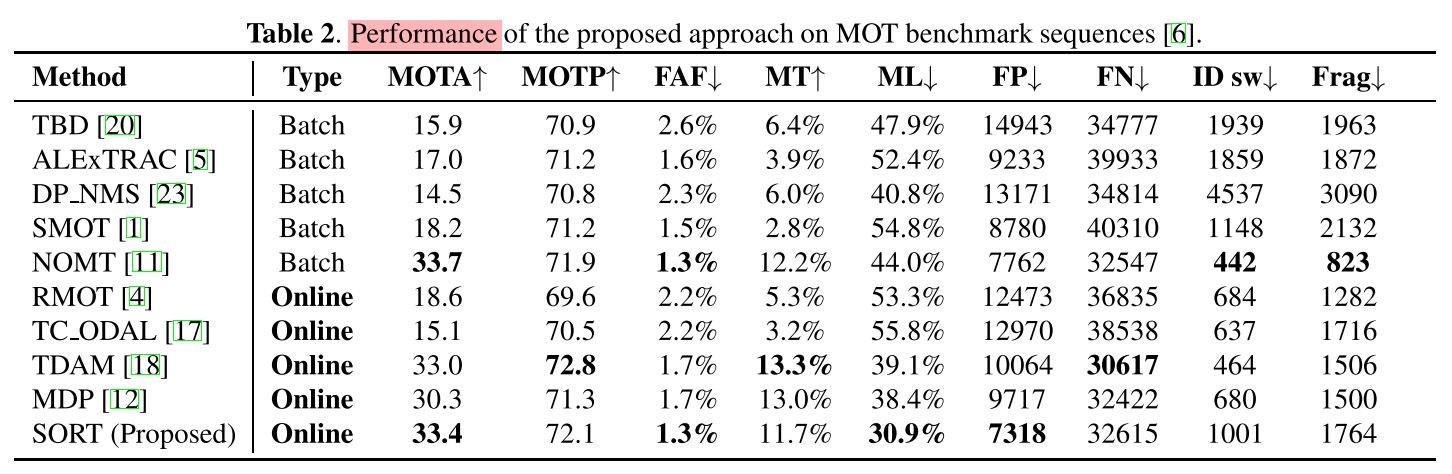
Kalman filterandHungarian algorithmfor the tracking components.- It achieves an accuracy comparable to
state-of-the-artonline trackers.
Problem Description
- Traditionally methods delay making difficult decisions while there is
high uncertaintyover the object assignments.- Recent developments still delay the
decision makingwhich makes them unsuitable for online tracking.
Problem Solution
Core Conception
Detection
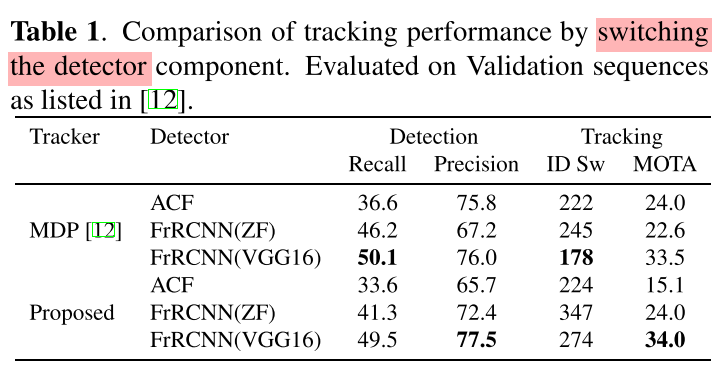
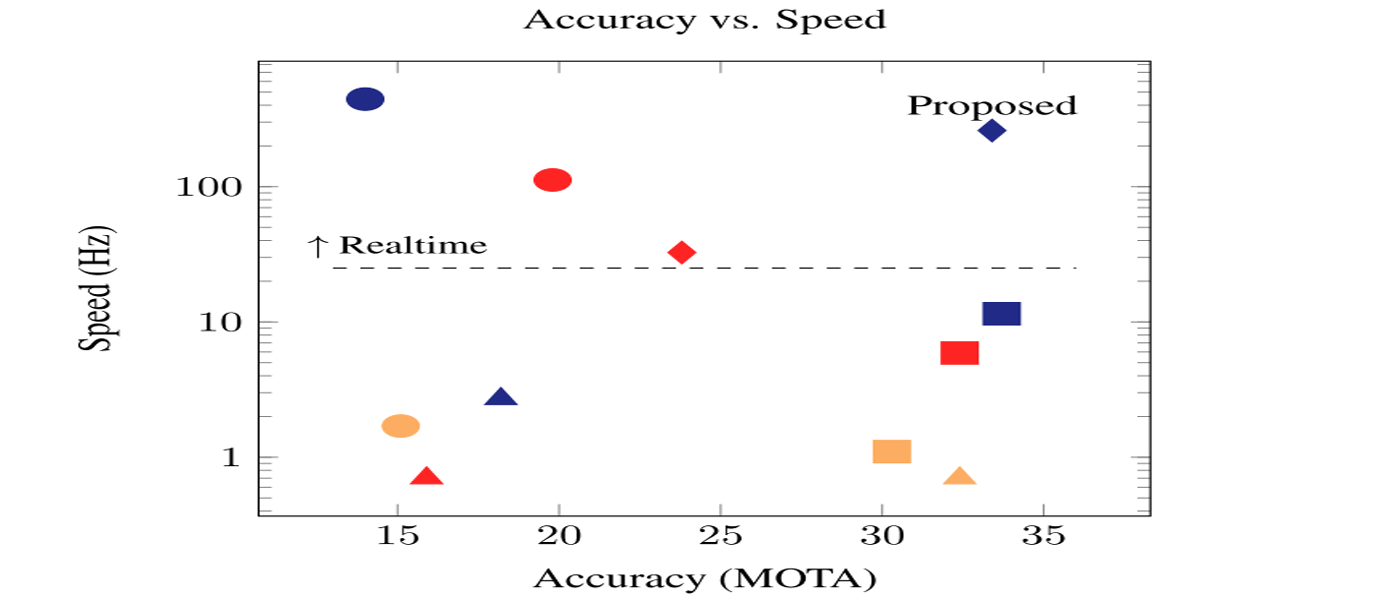
To this end, detection quality is identified as a
key factorinfluencing tracking performance, where changing the detector can improve tracking by up to 18.9%.
Estimation Model
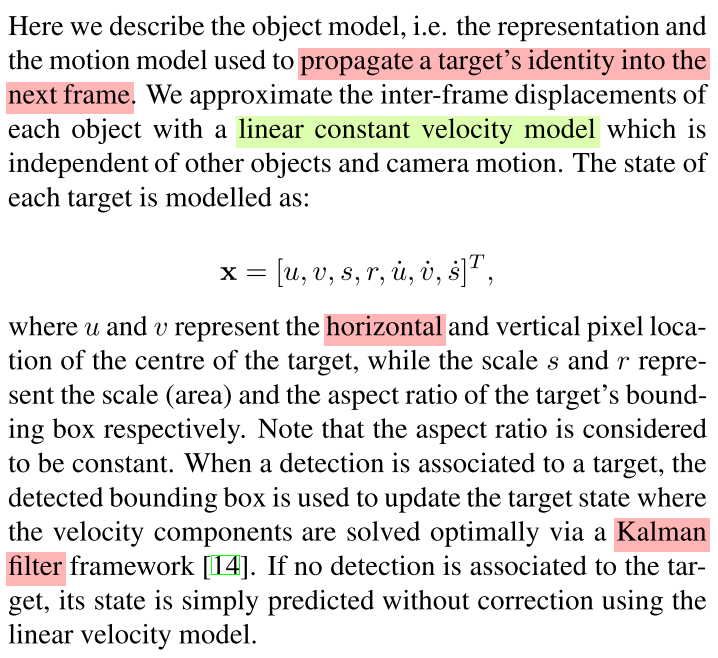
- It used to
propagatea target’s identity into the next frame.- It uses
Kalman filterwith a linear constant velocity model.- The state of each target is modelled as: $x=[u,v,s,r,\dot{u},\dot{v},\dot{s}]^T$.
Data Association
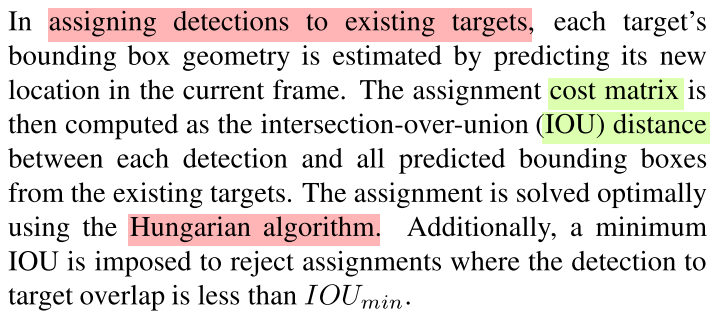
- It used to
assign detectionsto existing targets.- The assignment cost matrix is then computed as the intersection-over-union
(IOU) distance.- The assignment is solved optimally using the
Hungarian algorithm.
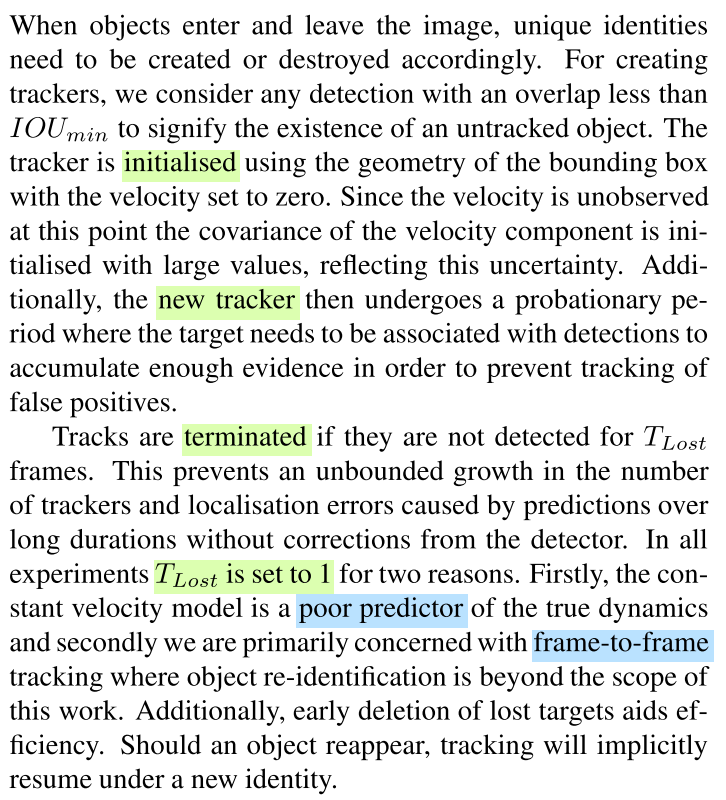
Creation and Deletion of Track Identities
Experiments
Code
The complete code can be found in SORT[5].
[Updating]
Note
- Allowing for new methods to focus on object
re-identificationto handle long term occlusion.- Future work will investigate a tightly coupled
detectionand tracking framework.
References
[1] Bewley, Alex, et al. “Simple online and realtime tracking.” 2016 IEEE International Conference on Image Processing (ICIP). IEEE, 2016.
[2] Gojay. “Faster R-CNN.” https://gojay.top/2019/10/19/Faster-R-CNN/
[3] Bzarg, Bot. “How a Kalman filter works in pictures.” https://zhuanlan.zhihu.com/p/39912633
[4] ZihaoZhao. “Hungarian algorithm and Kuhn-Munkres algorithm.” https://zhuanlan.zhihu.com/p/62981901
[5] SORT. https://github.com/abewley/sort