JRMOT[1] is a novel 3D MOT system that integrates information from
2D RGB imagesand3D point cloudsinto a real-time performing framework. There are some details of reading and implementing it.
Contents
Paper & Code & note
Paper: JRMOT: A Real-Time 3D Multi-Object Tracker and a New Large-Scale Dataset(arXiv 2020 paper)
Code: [Pytorch][Updating]
Note: JRMOT
Paper
Abstract
- JRMOT is a novel 3D MOT system that integrates information from 2D RGB images and 3D point clouds into a real-time performing framework.
- They also released the JRDB dataset, which is a novel large scale 2D+3D dataset.
- It demonstrates state-of-the-art performance against competing methods on the popular
2D trackingKITTI benchmark and serves as a competitive3D trackingbaseline for our dataset and benchmark.
Problem Description
MOT: the agent needs to perceive the motion of the multiple dynamic objects and other agents.
Reccent approaches:: perceive2D motionfrom RGB video streams.
Problem Solution
- It integrates 2D detection from
Mask R-CNNand 3D information fromF-PointNet.- It fuses the 3D shape descriptor with a 2D RGB descriptor through
Aligned-ReID.- It uses optimal joint probabilistic
data associationstep.- A novel multi-modal
recursive Kalman filterwas proposed.
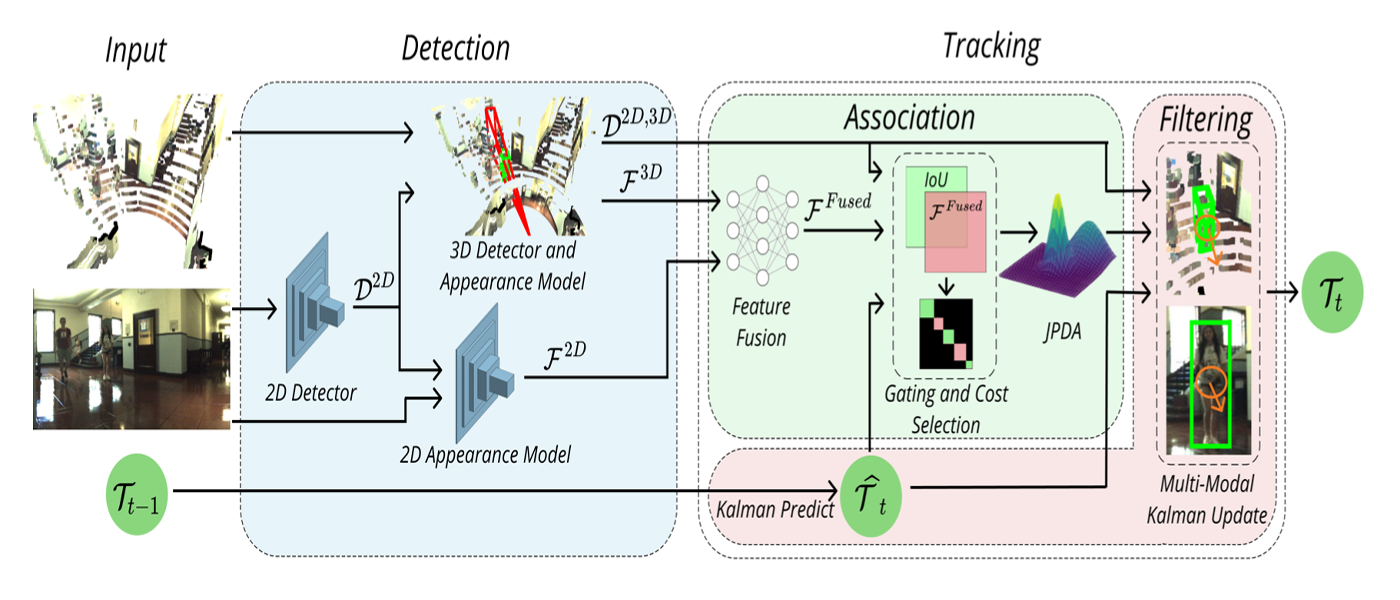
Conceptual Understanding
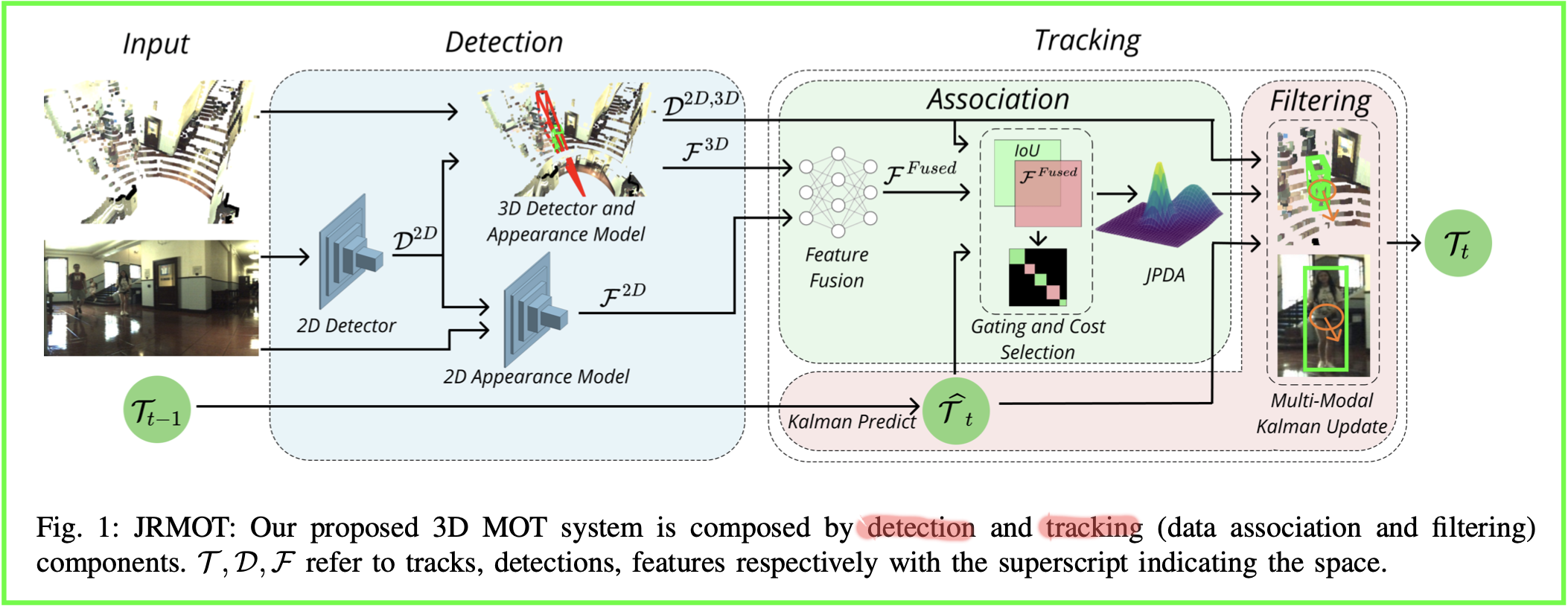
It shows all components of the JRMOT, and workflow as below.
Experiments
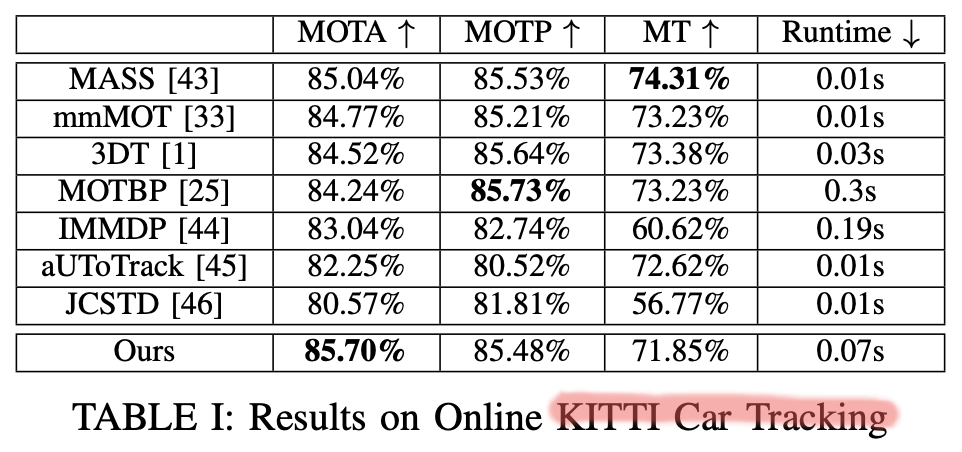
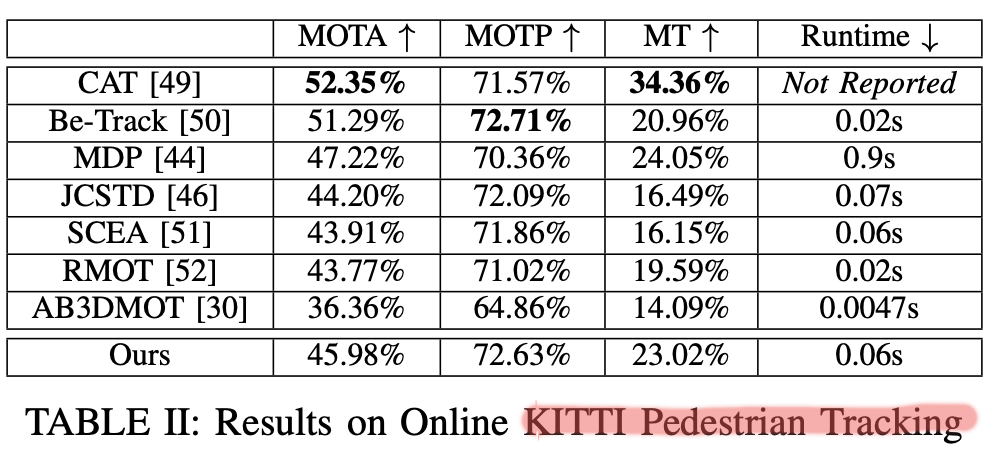
It results on online KITTI Car and Pedestrian Tracking, and gets SOTA performance.
Code
[Updating]
Note
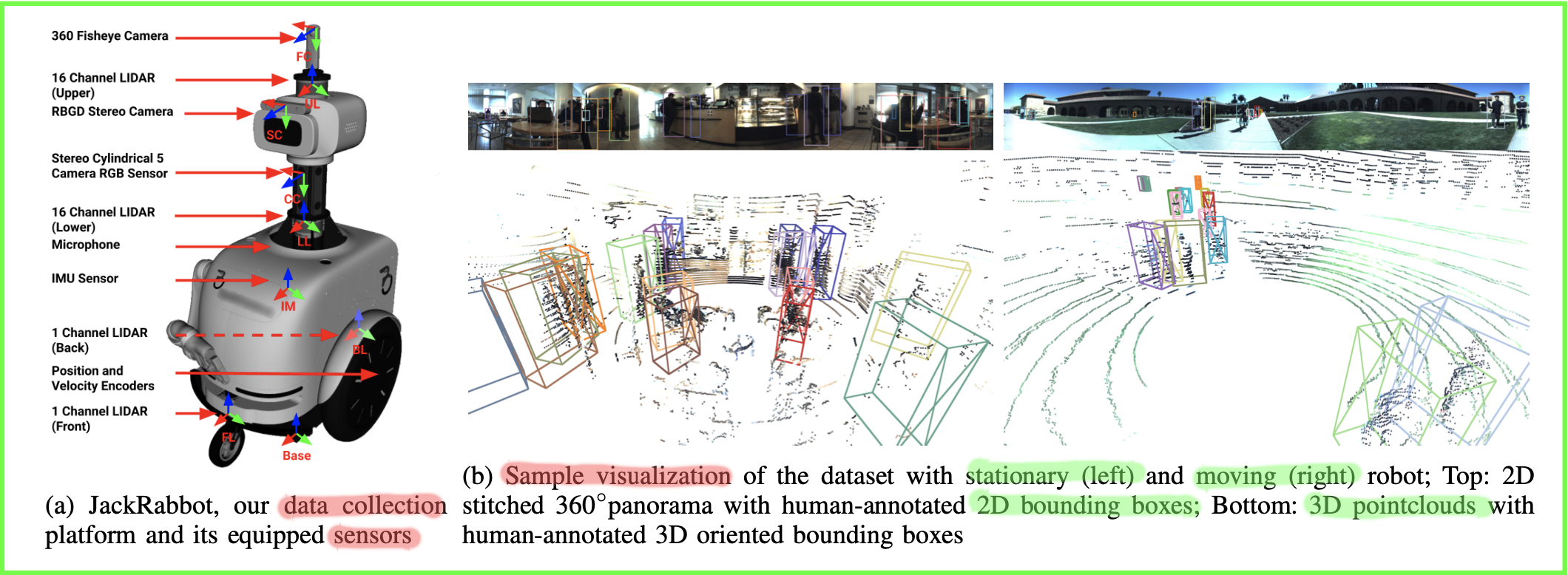
It shows data collection platform and sample visualization of the dataset.
References
- Shenoi A, Patel M, Gwak J Y, et al. JRMOT: A Real-Time 3D Multi-Object Tracker and a New Large-Scale Dataset[J]. arXiv preprint arXiv:2002.08397, 2020.