Pose-Assisted Multi-Camera Collaboration System[1] is a novel method, which enables a camera to cooperate with the others by sharing camera poses for AOT(active object tracking). There are some details of reading and implementing it.
Contents
Paper & Code & note
Paper: Pose-Assisted Multi-Camera Collaboration for Active Object Tracking(AAAI 2020 paper)
Code: [Pytorch][Updating]
Note: PAMCC-AOT
Paper
Abstract
- PAMCC-AOT is proposed to solve complex scenarios problems.
- The
vision-based controllertracks targets based on observed images.- The
pose-based controllermoves the camera in accordance to the poses of the other cameras.- At each step, the
switcherdecides which action to take from the two controllers according to the visibility of the target.
Problem Description
AOT: a tracker is able to control its motion so as to follow a target autonomously.
Problems: high complexity of environments and limitation of camera mobility.
Problem Solution
- It extend the independent AOT to the
CMC-AOT.- They proposed
PAMCC-AOTsharing camera poses.- They provided a set of
3D environments.
Conceptual Understanding
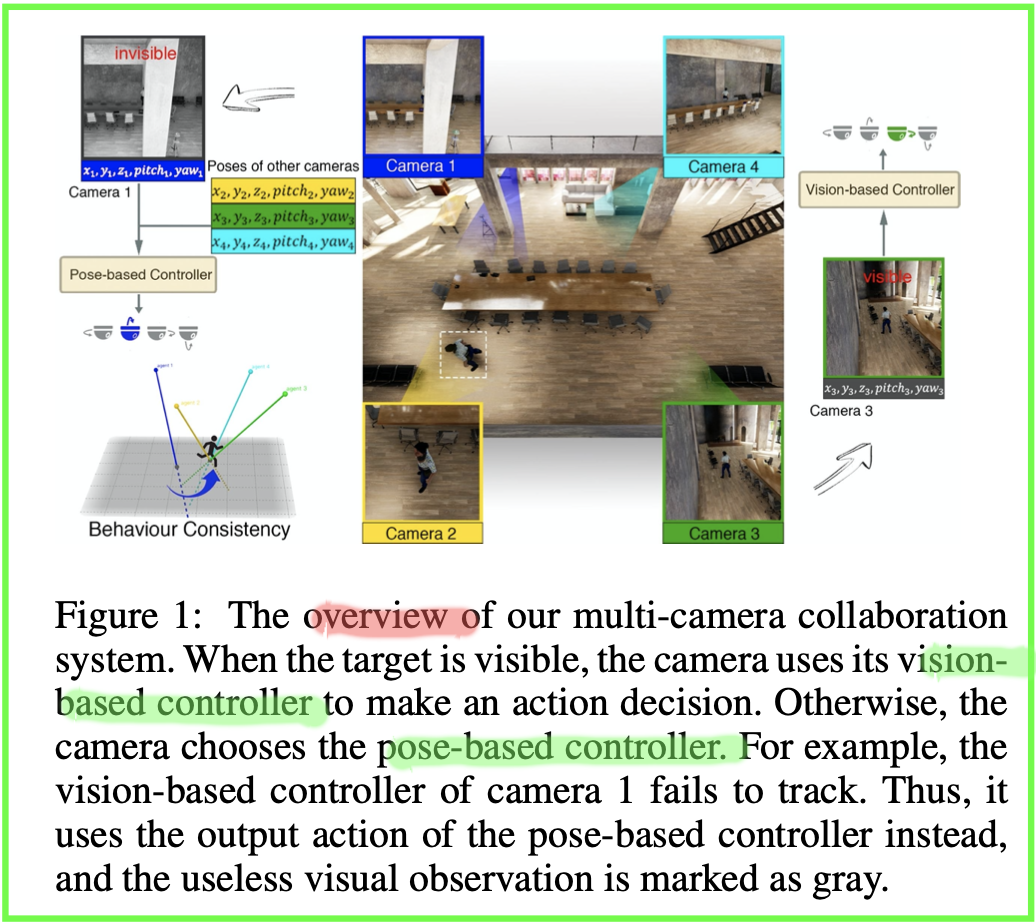
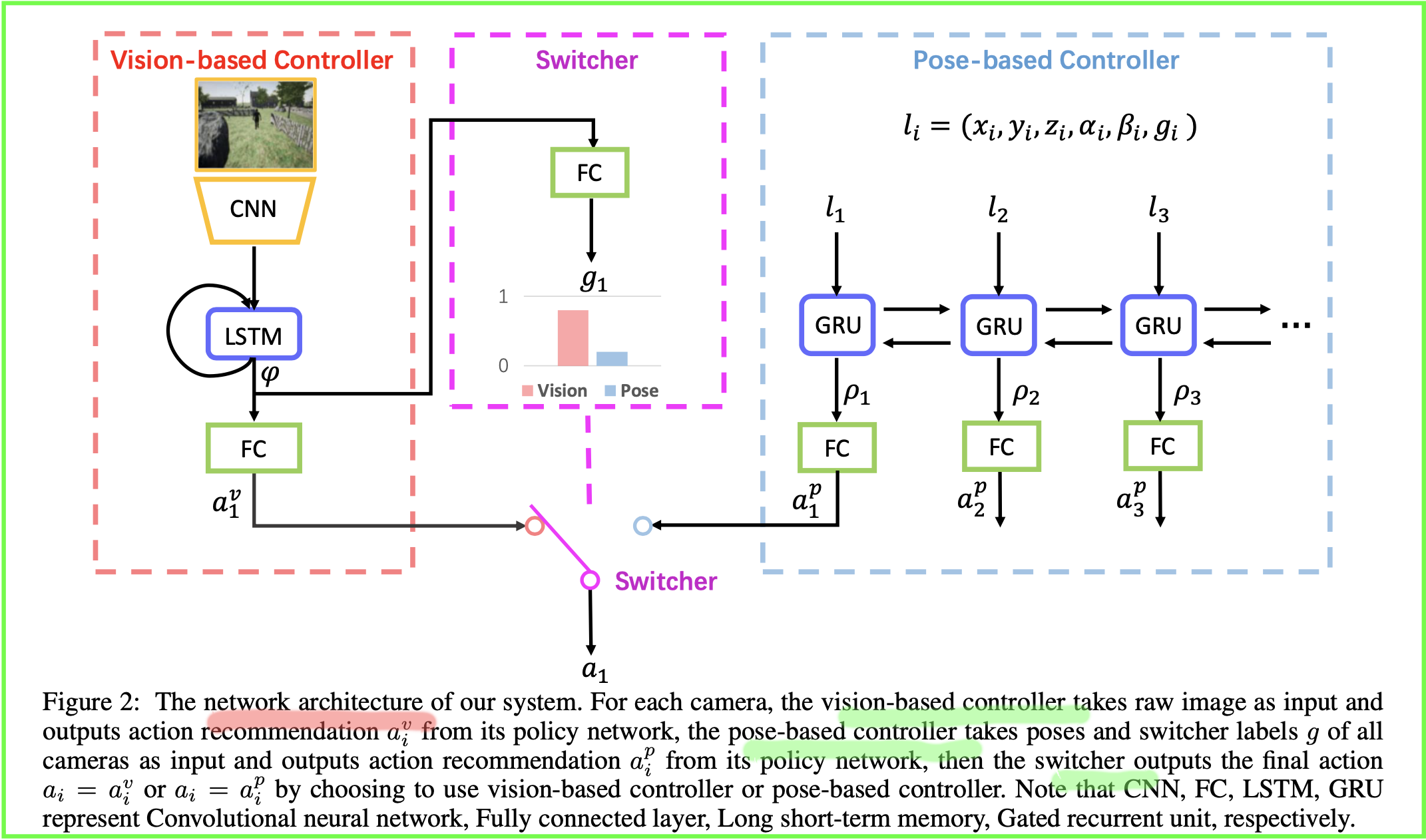
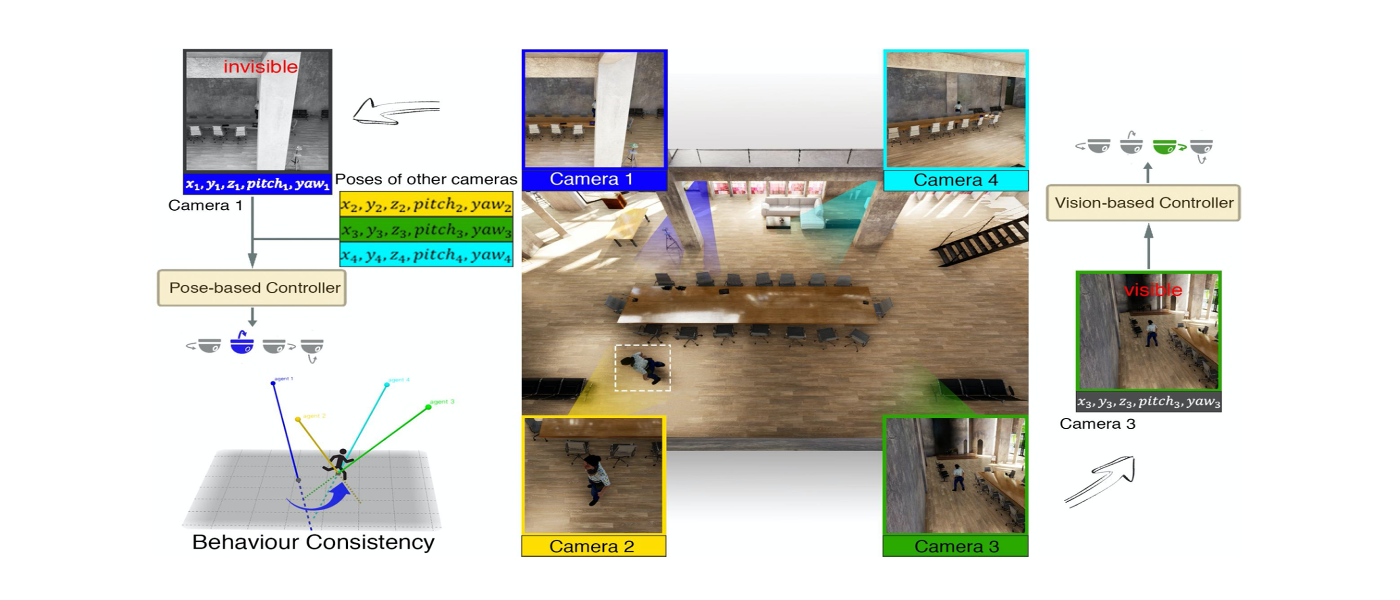
In the system, each camera is equipped with
two controllersanda switcher.
- Vision-based Controller: it serves as an image processor and guides the camera to execute policy based on image observation.
- Pose-based Controller: it helps the camera who receives an imperfect observation to execute policy based on the supplementary pose information provided by other cameras.
- Switcher: it makes the camera switch between the vision-based controller and pose-based controller properly.
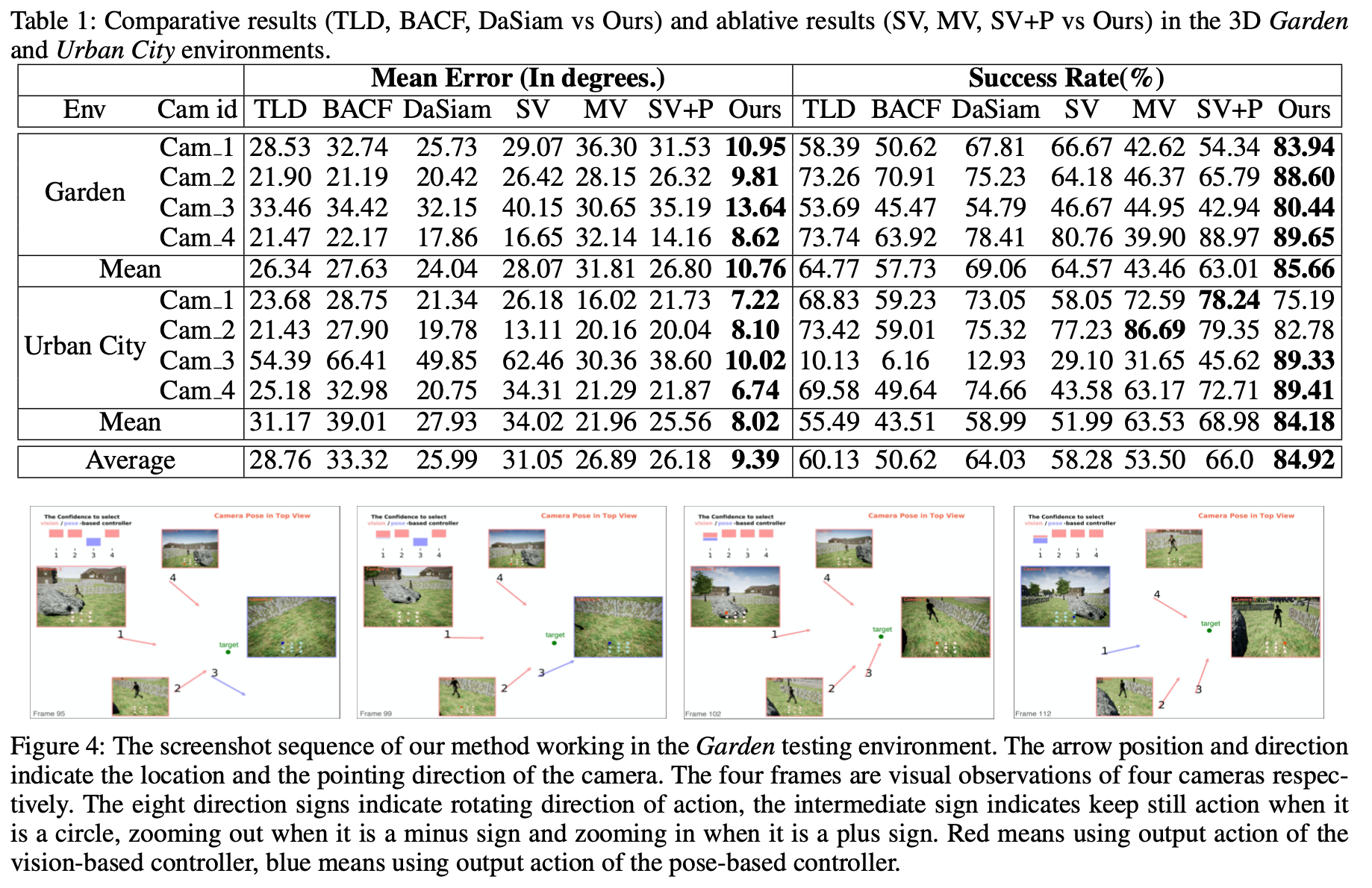
Experiments
Code
[Updating]
Note
References
[1] Li, Jing, et al. “Pose-Assisted Multi-Camera Collaboration for Active Object Tracking.” arXiv preprint arXiv:2001.05161 (2020).